peterholland
02.10.13 19:22
|
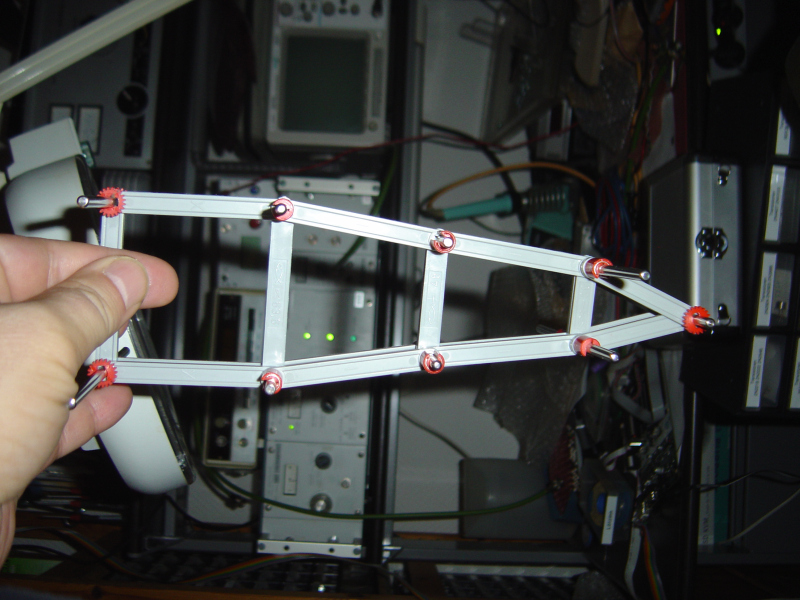
Der adaptive Fin-Ray-Greifer funktioniert wie einer Fischschwanzflosse.
Zwei flexible Bänder ( !!!!!) laufen wie ein Dreieck in der Spitze zusammen.
Zwischenstege in regelmässigen Abständen sind über Gelenke mit den Bändern verbunden.
Durch diesen flexiblen, aber festen Verbund passen sich die Greiffinger der Kontur eines Werkstücks an.
Schau mal :
http://www.ftcommunity.de/details.php?image_id=37287
https://www.youtube.com/watch?v=57bX1pdLtw0
https://www.youtube.com/watch?v=90cXfaFM4O8
Gruss,
Peter Poederoyen NL
|


 3Achs Rob_05
3Achs Rob_05
")