

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Modifizierter Trainingsroboter aus dem Baukasten 36069 Profi Computing von 1991
 Fin-Ray - Prinzip 3
Fin-Ray - Prinzip 3
|
Modifizierter Trainingsroboter aus dem Baukasten 36069 Profi Computing von 1991 |
Mitnehmer am Roboterarm

|
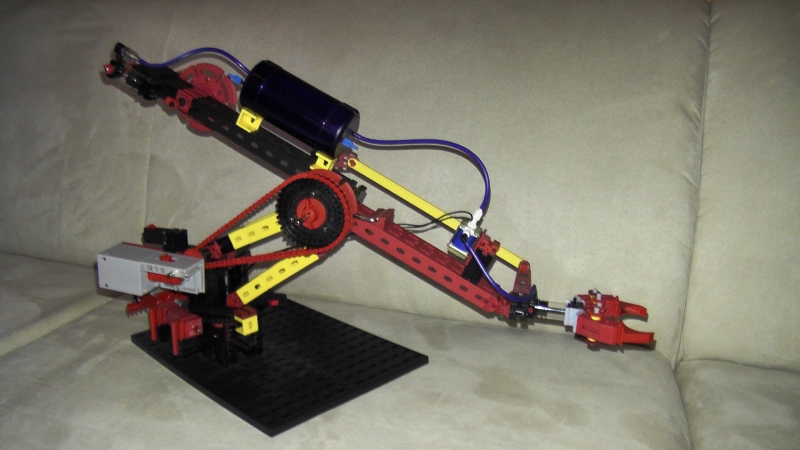
| Beschreibung: | Umrüstung auf Pneumatik Greifer von den Pneumatic Robots CVK-Modellen aus dem Schulprogramm von 1987. Diese Pneumatik-Greifer finde ich viel besser als die viel häufiger eingesetzten elektromechanischen Greifer mit Schneckengetriebe...
Der Kompressor ist auf den Arm montiert als Gegengewicht zum Ausbalancieren. Außerdem Umbau der 2 Drehachsen auf kräftigere graue M-Motoren. |
| Hinzugefügt am: | 09.02.15 17:13 |
| Konstrukteur: | Dirk Uffmann |
| Fotograf: | Dirk Uffmann |
| Hinzugefügt von: | uffi |
|
||||