

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Knickarm-Roboter (ohne Alus) | "Kniegelenk"
 "Schultergelenk"
"Schultergelenk"
|
"Kniegelenk" ")
|
Greifer

|
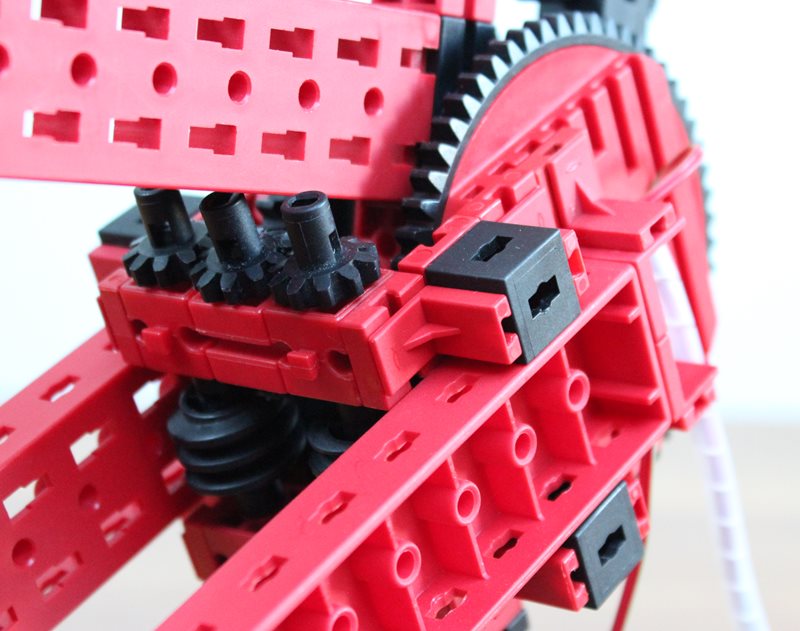
| Beschreibung: | Auch das Kniegelenk wird durch zwei Drehkränze bewegt, die von einem Power-Motor angetrieben werden. Die beiden Schneckengetriebe werden über Z10er auf beiden Seiten synchronisiert. |
| Hinzugefügt am: | 10.08.14 15:00 |
| Konstrukteur: | Dirk Fox |
| Fotograf: | Dirk Fox |
| Hinzugefügt von: | Dirk Fox |
|
||||||||||||||