|
Autor:
|
Kommentar:
|
Dirk Fox
05.01.12 01:41
|
Hallo Gaffalover,
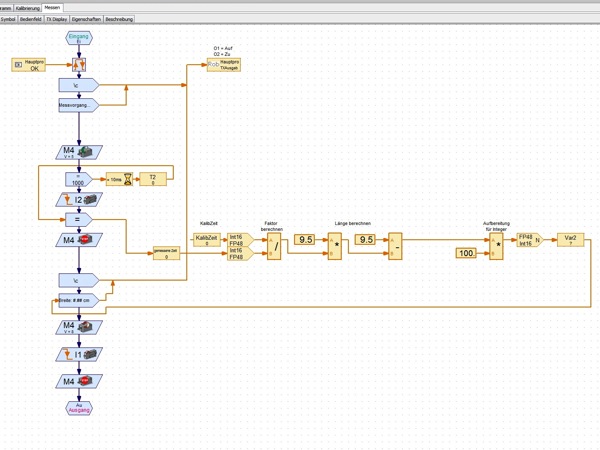
hier habe ich die lange Kette der Operatoren in Verdacht - damit habe ich auch schon schlechte Erfahrungen gemacht. Zu viele Operatoren "nebeneinander" (also quasi "gleichzeitig") können den TX überfordern (siehe auch den Hinweis in der Online-Hilfe zu Funktionen, 8.8.6). Möglicherweise wird die Rechnung schon genauer, wenn Du sie in mehr Einzelschritte (mit jeweils einem Zuweisungsbefehl) aufteilst.
Gruß, Dirk
|
| |
Stefan Falk
05.01.12 11:15
|
Tach auch!
Wie bitte? Das TX, mit einer 32-Bit-CPU mit vielen vielen Hz getaktet und einem Berg voll Speicher - kann die paar Rechenoperationen nicht ausführen? Da fällt mir ja echt nix mehr ein. Wie gut, dass ich den überspringe.
Gruß,
Stefan
|
| |
Dirk Fox
06.01.12 01:23
|
Hallo Stefan,
nach der Online-Hilfe garantiert die Firmware eine Befehlsausführung je ms (für einen Steuerungscomputer wohl auch eine sinnvolle Anforderung). In Reihe geschaltete Operatoren werden als ein Befehl interpretiert - das könnte mit drei Konvertierungen (Ganzzahl-Fließkommazahl), einer Fließkommadivision und zwei Fließkommamultiplikationen eng werden. Um es genauer abzuschätzen, müsste man die Befehls-Taktzyklen des ARM kennen...
Gruß, Dirk
|
| |
Gaffalover
06.01.12 13:25
|
Hm, müsste man sich nochmal mit auseinander setzen.
Danke für den Tipp!
|
| |
|


 Unterprogramm Kalibrierung
Unterprogramm Kalibrierung
")