|
Autor:
|
Kommentar:
|
Harald
15.04.09 19:04
|
Hallo Heiko,
dieses seitliche Verwinden müsste auch noch unterdrückt werden, oder stört es nicht? Und bei längerem Betrieb können die Achsen auch aus gut klemmenden Seiltrommeln rausflutschen. Da könnte die Achsverschraubung 38843 besser sein (gerade als SVR für 0,15 zu haben!)
Gruß,
Harald
|
| |
heiko
17.04.09 12:28
|
(Irgendjemand hat diesen Eintrag gefressen, deshalb schreib ich ihn ein zweites Mal)
Ja Harald, vielen Dank für die Rückmeldung. Die Achsverschraubung kannte ich noch gar nicht: Mir wäre nur die Kombination aus Spannzange und Zangenmutter eingefallen, und das ist ja eindeutig zu lang. Danke!
Tatsächlich ist das seitliche Verwinden das größte Problem. Das muss ich unbedingt beseitigen, damit das Gerät überhaupt funktioniert.
Im nächsten Versuch werde ich die Unterarme doppelt ausführen. Also zwei Armteile, die möglichst weit auseinander sind. Damit müsste ich das Drehmoment besser in den Griff bekommen.
|
| |
schnaggels
17.04.09 17:58
|
Kommt gut, ein Gesamtbild mit Plattform wäre mal gut :)
|
| |
|


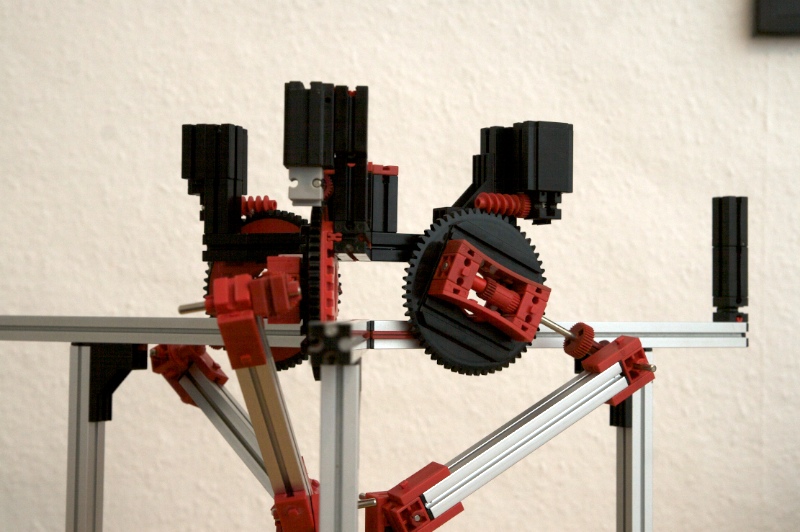
 Delta-Roboter Version 1 Arme gestreckt
Delta-Roboter Version 1 Arme gestreckt
")