|
Autor:
|
Kommentar:
|
Fredy
15.03.07 16:05
|
Hi,
Man das ist ja ein fettes Teil !!
Mach weiter so.
Gruß Frederik
|
| |
fitec
15.03.07 18:05
|
Da kann ich Fredy nur zustimmen.
Gruß fitec
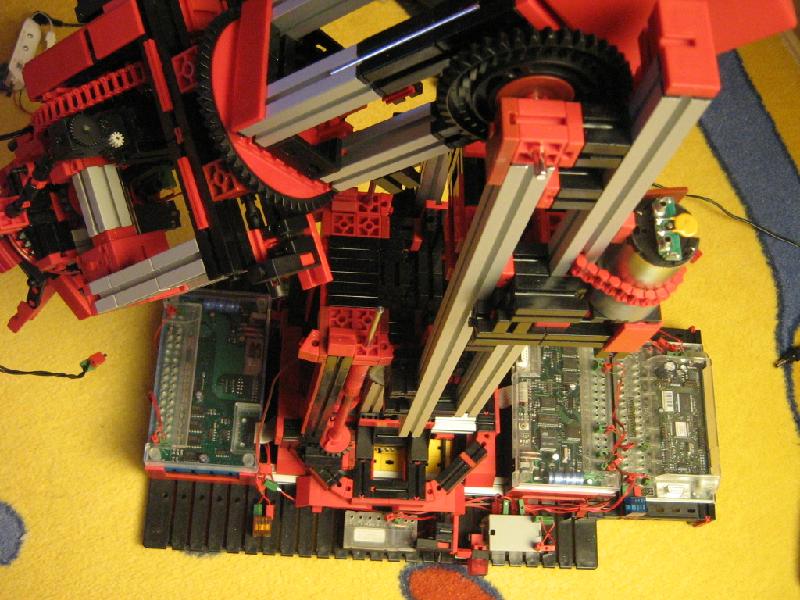
P.S. Wofür ist eigentlich der Empfänger unten in der Mitte?
|
| |
Severin
15.03.07 20:32
|
Zum Starten des Programms per Fernbedienung.
Gruß Severin
|
| |
Fredy
16.03.07 18:26
|
Hi,
Soll ich das so verstehen:
Du drückst M2 an deiner Fernbedinung und dann geht das Signal in einen Eingang des Interfaces ?
Gruß Frederik
|
| |
Severin
18.03.07 11:02
|
Ja genau ich drücke an M1 dadurch wird dann das Relais angeschaltet und dann wird über einen eingang das Programm gestartet. Ist dannach auch eine art Notausschalter der dann nur für das Intelligent Interface gilt.
Gruß Severin
|
| |


 Provisorisches Handgelenk(noch nicht fertig)
Provisorisches Handgelenk(noch nicht fertig)
")