|
Autor:
|
Kommentar:
|
schnaggels
28.04.08 17:10
|
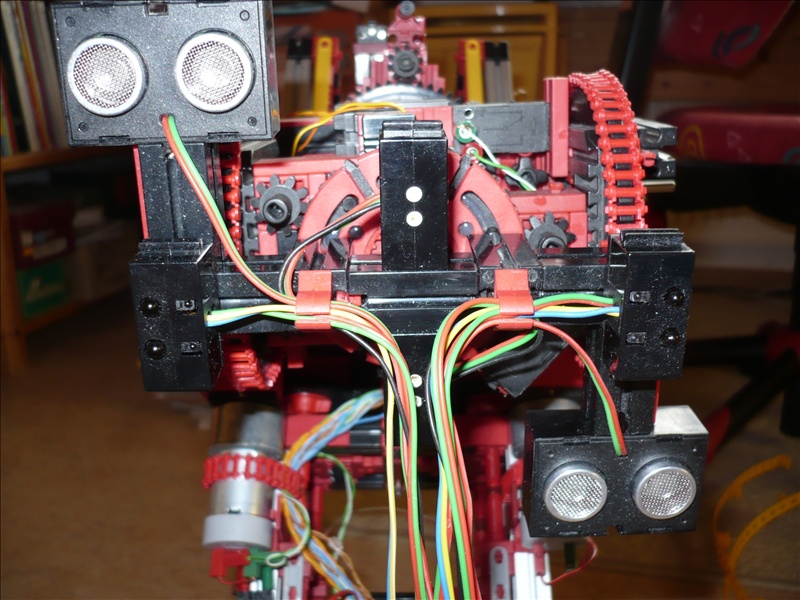
Soll der mit dem Greifer den Boden lang fahren? Die Linien- und Farb-Sensoren machen nur auf kurze Entfernung Sinn! Dann wären die US-Sensoren aber falsch, die müssten ja nach vorn und zu einer Seite blicken um nicht anzustoßen :)
|
| |
Severin
28.04.08 17:26
|
Ja soll er. Die US-Sensoren sind dafür da das der Roboter den absatnd zum boden richtig einhält.
|
| |
kehrblech
28.04.08 17:51
|
Das wird schwierig werden. Die US-Sensoren können keine Abstände < 3cm messen, die anderen Sensoren dürfen höchstens 3cm vom zu messenden Objekt entfernt sein. Das heißt du musst so nah an den Parcour, dass die US-Sensoren 3cm melden. Dann merkt der Roboter aber nicht mehr, ob er aufsetzt oder nicht, da die US-Sensoren ja keine Entfernungen unter 3cm messen können.
Eventuell hilft es die US-Sensoren etwas weiter nach hinten zu setzen.
Ach ja, hast du dir schon Gedanken über die Programmmierung gemacht?
|
| |
Severin
28.04.08 18:30
|
Die US-Sensoren sitzen 1,5cm tiefer. Die Spurensensoren gehen bis 3 cm. wenn ich dann sage der roboter soll 4cm abstandhalten sollte das funktionieren. Die Programmirung hab ich mir nur so durchdacht weil mein ROBO int. bis übermorgen belegt ist. Dann wird praktisch.
Gruß Severin
|
| |
Defiant
29.04.08 07:39
|
Vorsicht, US-Sensoren bekommen Probleme bei Teppiche.
|
| |
Severin
29.04.08 17:28
|
ok ,betrifft mich zum Gluck nicht. Will ja den parcour abfahren.
Gruß Severin
|
| |


 Seitenansicht
Seitenansicht
")