

ftCommunity | Bilderpool | Unsere Modelle | Radfahrzeuge | Zweiräder | eBike | Gepäckträger mit Steuer-Elektronik
 selbst balancierendes eBike
selbst balancierendes eBike
|
Gepäckträger mit Steuer-Elektronik ")
|
GY-86 Huckpack auf Arduino-Nano

|
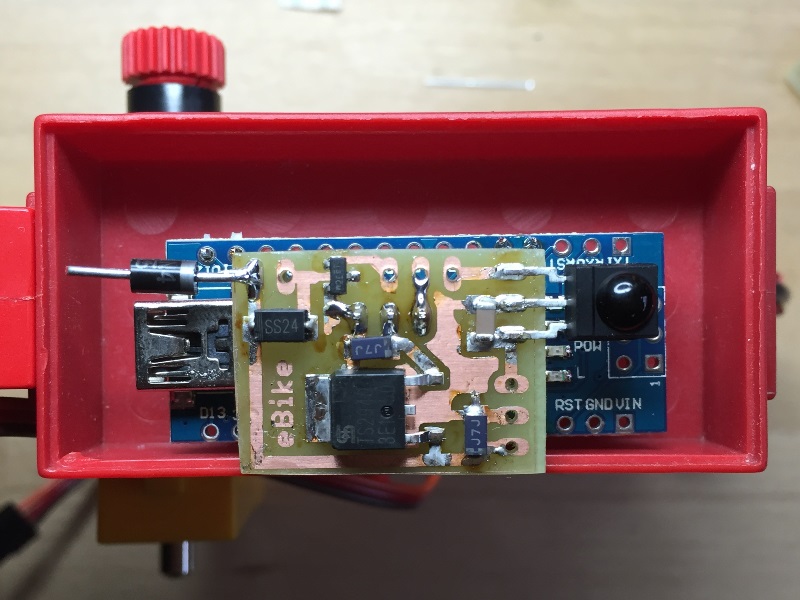
| Beschreibung: | Hier sieht man den Gepäckträger (9V-Batteriehalter von FT), der die Elektronik zur Steuerung aufnehmen soll und die Elektronik bestehend aus:
- Arduino Nano (18 x 45 mm) - GY-86 mit MPU6050 (3-Achs-Gyro + Beschleunigungssensor) - Selbstbau-Board zum Ansteuern des Lenk-Servos und des Antriebsmotors Das GY-86 ist hier schon Huckepack auf den Arduino gelötet, Verbindung über I2C-Bus. Das Selbstbauboard hat einen 5V-Spannungsregler (unten im Bild) für den Servo-Motor, einen MOSFET und Freilaufdiode für den Antriebsmotor und einen Infrarot-Fernbedienungsempänger (Anschluß an einem Interrupt-Pin des Arduino). Der Servo-Motor und der Antriebsmotor werden mit 16-bit-PWM über Timer1 vom Arduino-Board gesteuert. |
| Hinzugefügt am: | 19.02.15 18:44 |
| Konstrukteur: | Dirk Uffmann |
| Fotograf: | Dirk Uffmann |
| Hinzugefügt von: | uffi |
|
||||||||||