|
Autor:
|
Kommentar:
|
Mr Smith
24.04.09 14:29
|
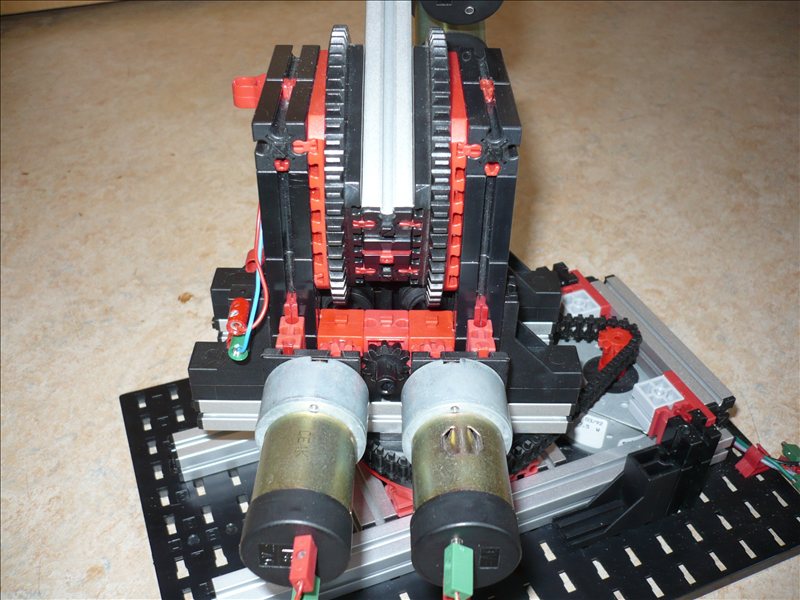
Das die beiden Motoren parallel geschaltet sind ist aber nicht so gut...
Einer ist immer stärker/schneller als der andere und dann blockieren die sich gegenseitig
|
| |
Stefan Falk
24.04.09 17:00
|
Ich würde vermuten, dass das Z10 in der Mitte sie zur Synchronität zwingt. So kann der langsamere Motor immer den schnelleren einholen und es läuft wunderbar. Wir hatten dazu schon mal eine längere Diskussion im Forum, such mal.
Gruß,
Stefan
|
| |
Mr Smith
24.04.09 19:56
|
Genau um dieses "gezwungen werden" geht es ja,
theoretisch müsste ein Differential dazwischen, aber das verbraucht dann relativ viel Platz.
|
| |
Mr Smith
24.04.09 20:37
|
Genau um dieses "gezwungen werden" geht es ja,
theoretisch müsste ein Differential dazwischen, aber das verbraucht dann relativ viel Platz.
|
| |
Mr Smith
24.04.09 20:38
|
sry für den doppelpost
|
| |
Severin
25.04.09 18:17
|
Dieses gezwungen werden ist nur im Leerlauf der fall. Unter Last sind die Motoren eh langsamer und daher kann jeder Motor seinen Beitrag leisten ohne größere Verluste.
|
| |


 Von Links (0.9)
Von Links (0.9)
")