|
Autor:
|
Kommentar:
|
Stefan Falk
16.02.14 15:39
|
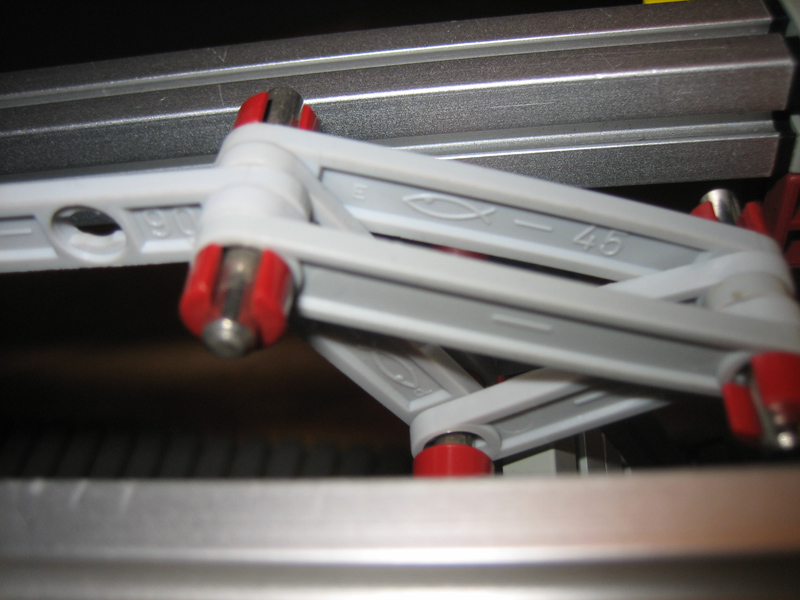
Ein rechtwinkliges Dreieck (und das wird doch benötigt, oder?) wäre es aber mit X-Streben 42,2 anstatt I-Streben 45, oder denke ich grad falsch?
Gruß, Stefan
|
| |
lemkajen
16.02.14 16:22
|
ich versuchs mal, bin mir aber nicht sicher, ob Das einer wird ;-)
es ist im Original rechtwinklig und gleichschenkelig, aber nicht gleichseitig, um mal die Sprache der Geometrie zu bemühen...
Mein ursprünglicher Ansatz war, möglichst Längen zu nutzen, die dem Original nahe kommen. die Rechtwinkligkeit habe dabei mal ignoriert .
|
| |
lemkajen
16.02.14 16:49
|
Danke Stefan, Du hast das Problem gelöst - manchmal ist man "betriebsblind"
|
| |
|


 Armmechanik
Armmechanik
")