

ftCommunity | Bilderpool | Exoten, 3D-Gedruckte Teile, Zubehör, Schnitzereien | Elektronik | Wandler für Encodermotoren | Versuchsaufbau zur Ermittlung der Positioniergenauigkeit
 Fertigbaustein
Fertigbaustein
|
Versuchsaufbau zur Ermittlung der Positioniergenauigkeit ")
|
Versuch Encoder Robo

|
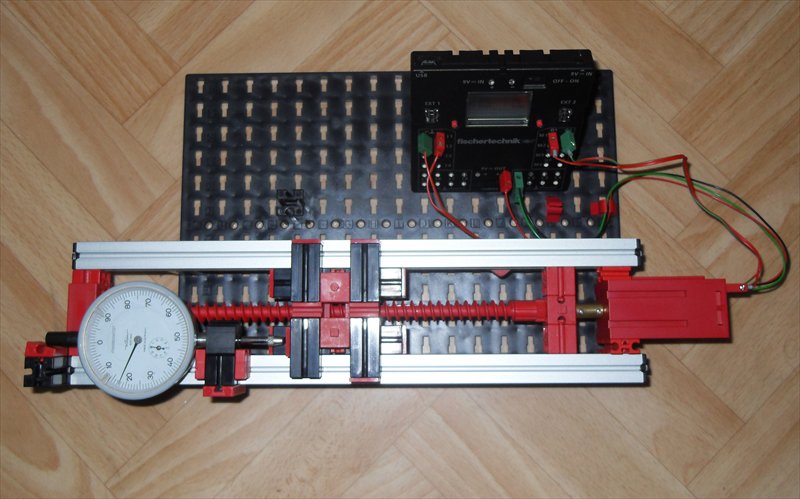
| Beschreibung: | Ich habe hier einen Versuchsaufbau gemacht um die Genauigkeit der Encodermotoren am TX und am Robo Interface in Verbindung mit meinem Inpulsewandler zu ermitteln.
Hier die Ergenisse: 1. Versuchsreihe: Fahren vom Referenzpunkt ( Taster ) auf Endposition. Weg: ca 50mm ( gefahren wurden 10 Wege ) TX mit Encoder durchschnittliche Abweichung: 0,05mm bester Wert: 0 schlechtester Wert: 0,13mm Robo mit Impulswandler ( 0 und 1 Impulse ausgewertet ) durchschnittliche Abweichung: 0,15mm bester Wert: 0,04 schlechtester Wert: 0,30mm 2. Versuchsreihe: Wiederholgenauigkeit Fahren vom Endpunkt um ca 25mm zurück und dann wieder auf Endposition ( gefahren wurden 10 Wege ) TX mit Encoder durchschnittliche Abweichung: 0,05mm bester Wert: 0 schlechtester Wert: 0,09 Robo mit Impulswandler ( 0 und 1 Impulse ausgewertet ) durchschnittliche Abweichung: 0,17mm bester Wert: 0,06mm schlechtester Wert: 0,35mm Wie genau die Powermotoren in Verbindung mit dem Impulserad und Taster sind habe ich nicht mehr ermittelt, wäre sicherlich als Vergleich auch interessant gewesen. Die Encodermotoren in Verbindung mit dem TX sind echt genau. Die Werte von den Econdermotoren in Verbindung mit dem Impulswandler und dem Robo Interface finde ich auch schon sehr gut. Was meint Ihr zu den ermittelten Werten? |
| Hinzugefügt am: | 29.01.11 21:53 |
| Konstrukteur: | TST |
| Fotograf: | TST |
| Hinzugefügt von: | TST |
|
||||||||||||||||||||||||||