|
Autor:
|
Kommentar:
|
lemkajen
19.02.17 08:29
|
Moin Holger,
softwareseitig - was ist alles in RoboPro angebunden? Wieviele Motoren kannst Du Steuern? Wie sieht der Sketch aus?
Viele Grüße
Jens
|
| |
david-ftc
19.02.17 09:57
|
Hallo Holger,
mich würde auch interessieren, wie die Anbindung an RoboPro aussieht. Was muss man in RoboPro einstellen, damit der Computer den Arduino anstatt des TX(T) erkennt? Wofür sind die Widerstände?
Gruß
David
|
| |
fishfriend
19.02.17 15:00
|
Hallo...
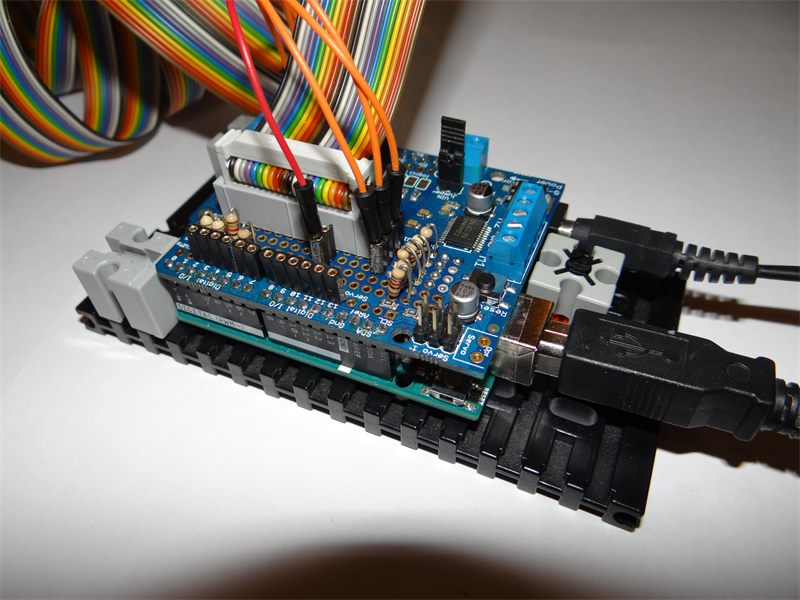
In RoboPro einfach TX einstellen, das ist alles. Der Arduino wird als TX erkannt wenn man über Bluetooth, alle anzeigen geht und dort den Arduino Uno anwählt der dort angezeigt wird.
4 Motoren lassen sich auch in der Geschwindigkeit steuern.
Abhängig (!) davon kann man die O-Ausgänge des Arduino benutzen - diese jedoch bis dagen wir mal so 20mA.. Damit kann man weitere Elektronik (auch Treiber) oder LEDs steuern.
Die 1k Widerstände sind da, weil es störungen durch EMV gibt. Die langen Kabel wirken wie Antennen z.B. vor dem Monitor und dann werden wilkürliche Werte angezeigt. Bei den alten Computing war das 20pol Kabel auch mal 1,2 Meter lang, hinzu kommt dann noch die Verkabelung des Models.. 10k ist zu gross, die hatte ich erst darauf gelötet weil sie auf dem Steckbrett funktionierten.
Ich schreib noch eine ausführliche Anleitung dazu.
Gruß
Holger
|
| |
lemkajen
20.02.17 19:49
|
Und auf dem Arduino muss doch sicher ein Sketch laufen, oder?
|
| |
fishfriend
23.02.17 18:32
|
Hallo...
Ja, ich bin dabei eine Anleitung zu schreiben.
Auch gibt es dann RoboPro Programme für die Computing Bausätze.
Ich versuch gerade zusätzlich noch soetwas wie eine Extension zu machen, was aber momentan gar nicht laufen will.
Das Grundprogramm läuft und wenn man auf Stop geht oder den USB-Stecker zieht schaltet er ab.
Gruß
H. Howey
|
| |


 TX Light
TX Light
")