

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | 6-Achs-Roboter 2 (Severin) | Achse 3 (0.9)
 Achse 1-3 (0.9)
Achse 1-3 (0.9)
|
Achse 3 (0.9) ")
|
Achse 4 und 5 (0.9)

|
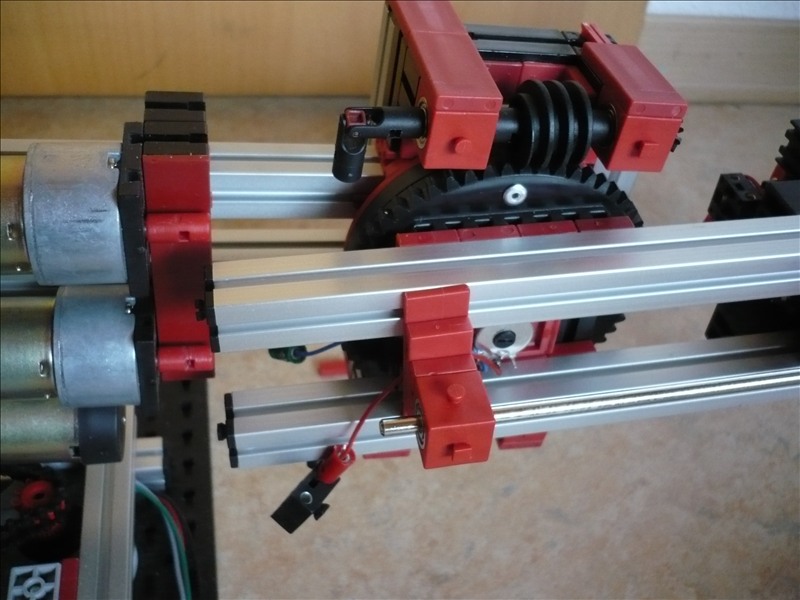
| Beschreibung: | Die Verbindung der beiden Motoren zur 3. Achse wird über die Kardangelenke von TST erfolgen. |
| Hinzugefügt am: | 22.04.09 17:56 |
| Konstrukteur: | Severin |
| Fotograf: | Severin |
| Hinzugefügt von: | Severin |
|
||||||