|
Autor:
|
Kommentar:
|
Triceratops
04.08.09 03:26
|
Hallo
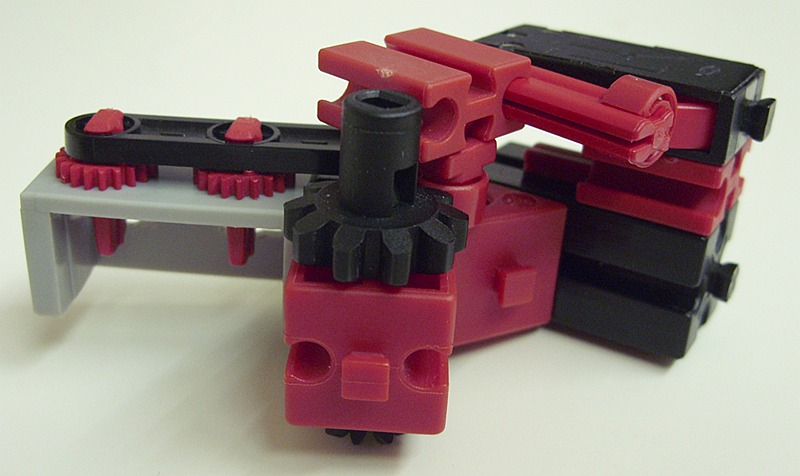
Wenn ich das richtig interpretiere, so ist die Feder des Minitasters auch
die Rückstellfeder für den "Schalthebel", oder? Interessant in so einem
Kontext wären auch Varianten mit den anderen Zahnrädern wie Z20, Z30
oder gar dem Z40 für extreme Auflösung. In manchen "Maschinenparks"
könnte ich mir sowas vorstellen - oder eben Steuerungen für Roboterarme.
Gruß, Thomas
|
| |
Stefan Falk
04.08.09 11:19
|
Tach Du Nachtschwärmer ;-)
Das siehst Du richtig, der Taster ist gleichzeitig das Rückstellglied.
Die Idee mit den großen Zahnrädern finde ich prima, hab ich gar nicht dran gedacht. Evtl. ist das dann sogar leichtgängiger.
Wer baut den ersten mechanischen Quadraturencoder? ;-)
Gruß,
Stefan
|
| |
Udo2
05.08.09 22:53
|
Hallo Thomas und Stefan,
an welche Drehzahlen habt ihr denn da so gedacht? Und wo wäre dann die Grenze mit dem ROBO Interface? Sollten den ROBO TX Controller schon alle haben?
Gruß Ingo
|
| |
Udo2
05.08.09 23:00
|
Ergänzung:
Bei größeren Zahnrädern sind im Gegensatz zum Z10 die Zahnlücken etwas enger. Möglicherweise muß dann schon ein Verbindungsstück 45 sein ...
|
| |
Stefan Falk
06.08.09 00:41
|
Tach Ingo,
die Drehzahlen müssen so sein, dass die Mechanik, das RoboInt und seine Software noch mitkommen, klar. Das Robo Interface liest ja alle 10 ms seine Eingänge. Wir müssen also < 100 Änderungen/s, also < 50 Impulse (Zähne) / s bleiben, also < 5 Umdrehungen pro Sekunde beim Z10.
Gruß,
Stefan
|
| |


")