|
Autor:
|
Kommentar:
|
schnaggels
30.05.06 12:49
|
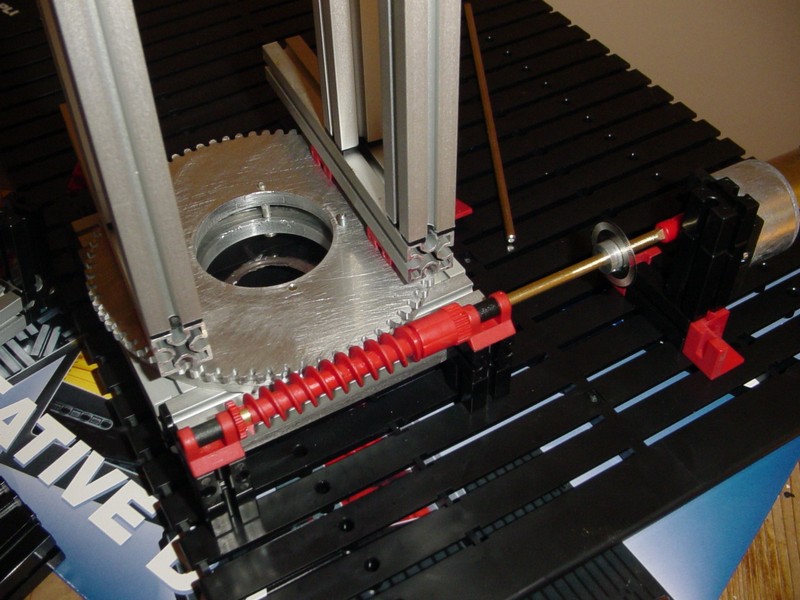
Wow, da steckt viel Zeit an der Fräsmaschine drin!
Wie sieht es denn mit dem Spiel zwischen Drehkranz und Schnecke aus? Ohne geht fast gar nicht so weit ich weiß und die 0,02 Grad erscheinen mir sehr theoretisch :) Sehr wenig Spiel geht doch nur bei hoher Reibung und damit Abrieb an der roten Schnecke oder liege ich da falsch?
Gruß,
Thomas
|
| |
remadus
30.05.06 13:16
|
Das Spiel kriegt man raus, wenn ein Rest von Schwergängigkeit bleibt und wenn im Antrieb kein Kraftrichtungswechsel stattfindet. Dreht man die Drehrichtung um, dann zählt man die Leerlaufschritte, bis sich der Zahnkranz wieder bewegt und programmiert das als Leerweg ein.
Die 0,02 Grad sind nicht theoretisch, sondern praktisch und echt. Das ist aber nur die Auflösung und nicht die Genauigkeit. Die Genauigkeit kann erst nachträglich festgestellt werden und ergibt sich aus den Teilungsfehlern der Verzahnung, Gangfehler der Schnecke, Schneckentaumel usw...
Wenn wirklich 0,02 Grad Genauigkeit benötigt werden, dann hilft nur noch ein Inkrementalgeber mit 4500 Strich Auflösung und Quadraturdecoder.
|
| |
hufi
30.05.06 13:43
|
Stimmt, die Auflösung von 0,02 Grad bringt praktisch nicht mehr viel der Gag liegt darin dass man hier z.B. 120 Teilungen in der Taktscheibe hat mit einem Encoder im Quad Mode pro Umdrehung 480 Zähler erzeugt x 72 Zähne ca. 35000 Pulse/ Umdrehung.
Wenn ich davon ausgehe das ich ca. 1000 Pulse tatsächlich positionieren will kann ich die unteren 8 Bit des Zählers dazu verwenden um innerhalb der erreichten Position den Motorstrom zu kontrollieren (z.B. Bremsen oder auf Position halten) ohne aus der Zielposition zu fallen.
Das Spiel des Zahnkranzes kann fast gegen Null gehalten werden (zumindest für dieses Projekt völlig ausreichend) jedoch geht dies zulasten des Abriebes an der Kunststoffschnecke.
lg Hufi
|
| |
|


 6AX Alu Drehkranz seite
6AX Alu Drehkranz seite
")