

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | 6-Achs-Roboter 2 (Severin) | Gesammtansicht (0.9)
 Achse 4 und 5 (0.9)
Achse 4 und 5 (0.9)
|
Gesammtansicht (0.9) ")
|
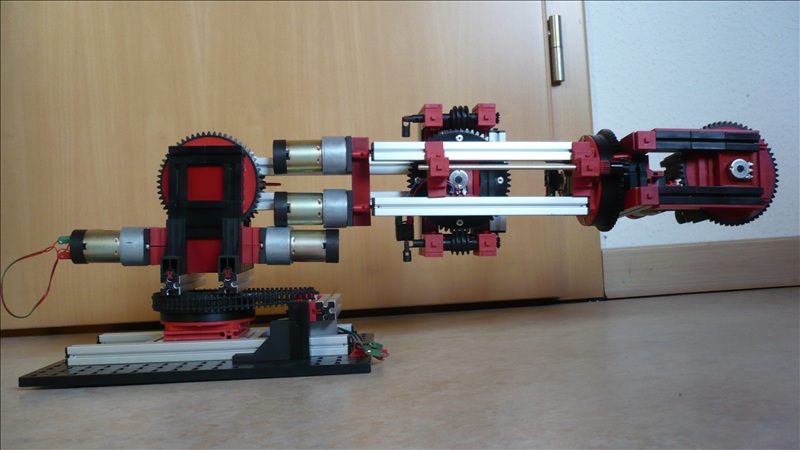
| Beschreibung: | Hier sieht man Wunderschön die extreme Belastung von Achse 1 und 2. Selbst die aluverstärkte Platte hängt in der Luft. Besonders dort sind die Kugellager extrem effektiv. Um den Roboter aus dieser Position zu bewegen reichen auch 2 Motoren aus, ohne Kugellager geht da selbst mit 4 Motoren nichts. Mit 4 Motoren ist an der Spitze sogar noch 200g anhebbar. In der Position macht eher der Schrittmotor Probleme.... |
| Hinzugefügt am: | 22.04.09 17:56 |
| Konstrukteur: | Severin |
| Fotograf: | Severin |
| Hinzugefügt von: | Severin |
|
||||||||||