

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Hexapoden und laufroboter | IMG_20160604_081342
 IMG_20160604_081314
IMG_20160604_081314
|
IMG_20160604_081342 |
IMG_20160604_081402

|
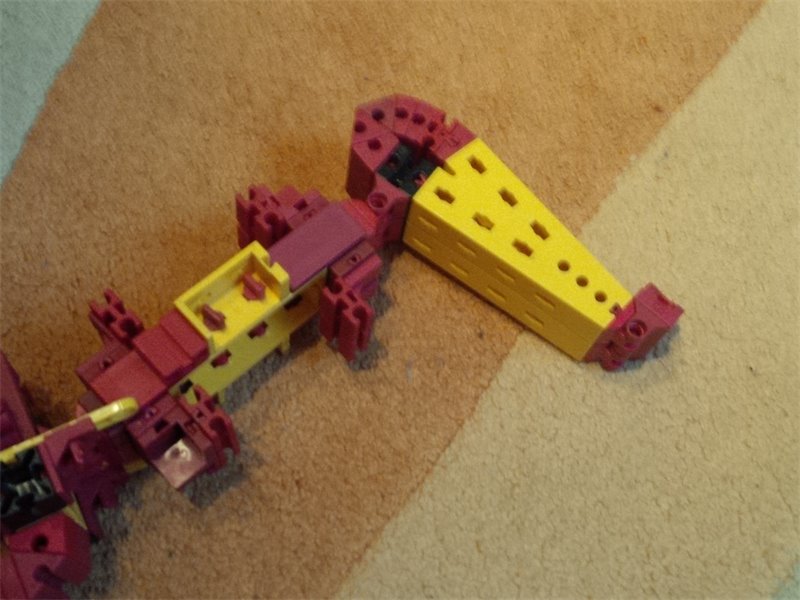
| Beschreibung: | konstruktrion von beinen für einen Laufroboter. Als Antrieb sind Standard servos (40x40x20 mm) vorgesehen.
Die hubkraft der servos sollte bei dem Modellgewicht etwa 10-20 kg betragen. |
| Hinzugefügt am: | 21.01.18 09:22 |
| Konstrukteur: | nicolas kurz |
| Fotograf: | nicolas kurz |
| Hinzugefügt von: | nicolas kurz |
|
||||