|
Autor:
|
Kommentar:
|
schnaggels
01.09.14 16:20
|
super Idee, ob die große Bauplatte aber ein Umkippen in allen Lagen verhindert?
|
| |
Stefan Falk
01.09.14 18:47
|
Und ob 1 Zapfen pro Ecke genügt? Ich habe schon Zapfen bei starkem Zug aus Nuten springen sehen.
Gruß, Stefan
|
| |
Marten70
02.09.14 22:47
|
:D gerade das Idee das ich fur ein Kran benutzen wollte, wobei ich den Abstand zwischen die Drehscheiben doppelt so gros gemacht habe, und an beiden Seiten Bausteine 30 benutze.
Die Lösung mit den Platten hätte ich mich noch nicht gedacht. Klasse!
Stefan, was meinst du mit 1 Zapfen pro Ecke? Welche Ecke?
MfrGr Marten
|
| |
bummtschick
03.09.14 00:24
|
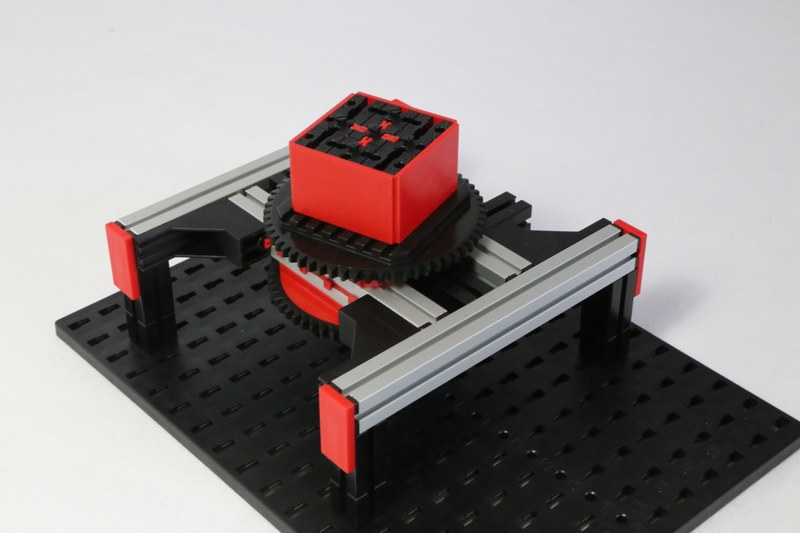
Die Ehre der Idee mit den doppelten Drehkränzen und drehendem Aluprofil gebührt "heiko". Siehe hier: http://www.ftcommunity.de/details.php?image_id=3462 Das hatte ich auch bei Bertha V1 schon probiert und für sehr gut befunden.
Stefan, was die Zapfen betrifft, mach ich mir auch wenig Sorgen. Die Zapfen wären bei seitlichen Kräften gefährdet. Die Kräfte wirken hier aber ganz wesentlich von oben nach unten, wenn auch unteschiedlich viel auf die vier Ecken, wenn der Arm ausgefahren ist. Damit werden nicht primär die Zapfen belastet, sondern der Stein als Ganzes. Die Konstruktion hat bei Bertha V1 so ähnlich gut gehalten.
Aber wir werden sehen, ob's tatsächlich hält, wenn der Roboter erst richtig loslegen kann. :-)
|
| |


 03 Bertha V2 Baustufe (5440)
03 Bertha V2 Baustufe (5440)
")