|
Autor:
|
Kommentar:
|
Stefan Falk
18.01.07 23:13
|
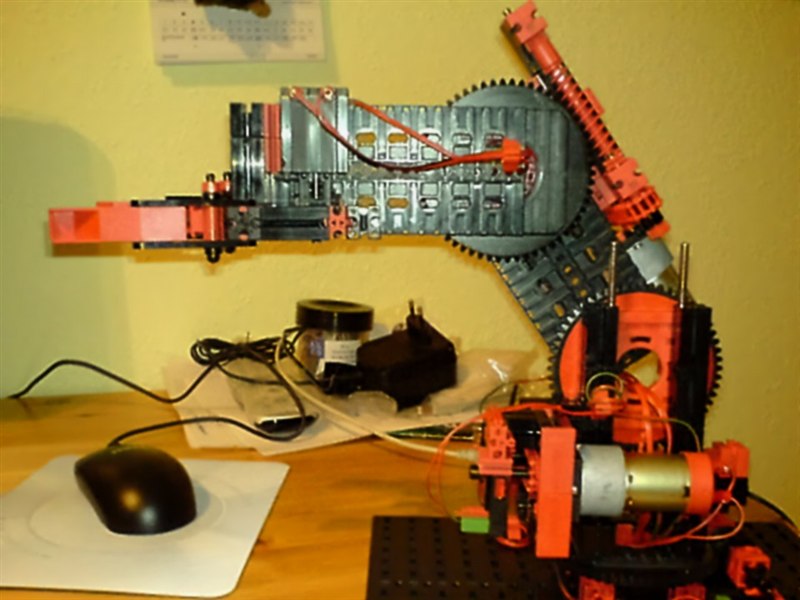
Auch eine gute Idee, die schwarzen Bauplatten als Arme zu benutzen. Schön stabil und gut anbaubar.
Gruß,
Stefan
|
| |
Fredy
19.01.07 09:19
|
Hallo,
fährt der Roboter mit seinem Greifer eine Position immer wieder geich genau an ?
Gruß Frederik
|
| |
remadus
19.01.07 11:18
|
Je nachdem, was Genauigkeit bedeutet.
Mit dem hier realisierten Getriebe und der angebauten Sensorik, arbeitet der Roboter mit einer 1,29 Grad-Auflösung. Damit hat die oberste Achse eine Ortsauflösung von knapp 5 mm, wenn ich den Hebel mal mit 200 mm Länge annehme.
Die größte Ungenauigkeit am Greifer ergibt sich durch die Drehachse. Hier ist die Ortsauflösung 1 cm plus Umkehrspiel. Ein Untersetzungsgetriebe am Antrieb der Drehachse und das Anfahren der Position aus immer der gleichen Richtung würde die Ortsgenauigkeit erheblich erhöhen. Mein Vorschlag wäre eine 1:4 Untersetzung und eine Softwareänderung. Ortsgenauigkeit dann womöglich besser als 5 mm.
Die jetzige Bauform erlaubt bestimmt, einen Gegenstand, der mal abgestellt wurde, wieder zu greifen. Die Steifigkeit der Maschine und vorallem die Vorspannung der beiden waagerechten Drehachsen durch das Eigengewicht bringen Vorteile.
Geniale Maschine, super gemacht.
Bis dann
Remadus
|
| |
StefanL
19.01.07 14:13
|
Hallo,
danke für die Kommentare. Der Roboterarm ist ja eigentlich noch nicht ganz fertig. An den Greifer sollte eigentlich noch ein Achse hinkommen. Sonst ist der Greifer in den meißten Positionen schräg. Allerdings hab ich dann kein Impulsrad mehr für den Greifer.
Aber das müsste ja auch ohne gehen wenn ich einen Taster zur endschaltung hin mache. Zu der Genauigkeit: eine umdrehung ca. 232 Impulse (1-0=viertel umdrehung)
Gruß Stefan
|
| |
fitec
19.01.07 20:43
|
@StefanL:Du könntest ja den Greifer pneumatisch machen, dann hättest du noch ein Impulsrad.
Gruß fitec
|
| |
StefanL
19.01.07 20:44
|
Hallo,
das Problem ist grad dass ich mein 4. Impulsrad nicht mehr finde :(
Der Greifer habe ich jetzt mit Endabschaltung gemacht.
Gruß Stefan
|
| |
StefanL
20.01.07 10:18
|
Hallo,
ich hab das Impulsrad jetzt gefunden.
Ich werde jetzt den unteren Drehkranz durch einen selbst gebauten ersetzen damit ich für die 4. Achse eine Drehscheibe habe.
Gruß Stefan
|
| |
Stefan Falk
20.01.07 12:20
|
Tach auch!
Falls es wirklich mal an Impulsrädern mangelt, gehen ersatzweise auch die alten kleinen Seilrollen 31016, http://www.knobloch-gmbh.de/shop/query.php?cp_sid=284034f68820&cp_tpl=5504&cp_pid=16149&cp_cat=
So findet sich das auch in den Anleitungen zu den frühen Computingkästen. Man hat nur halb so viele Impulse pro Umdrehung wie beim Impulsrad, aber damit kann man wohl auch leben.
Gruß,
Stefan
|
| |


 Roboterarm 9
Roboterarm 9
")