| Beschreibung: |
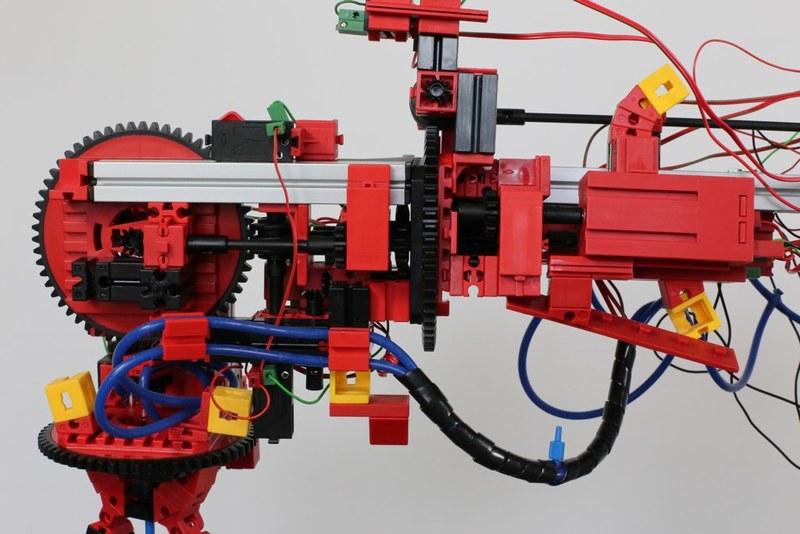
Wieder zurück in der alten Blickrichtung. Der vordere Encodermotor treibt Gelenk Nr. 5 an, welches den Greifer in "pitch"-Dimension schwenken kann (hier in Nullposition; der rechte der beiden gelben Statiksteine auf dem letzten Drehkranz links unten im Bild drückt den Endtaster). Die Konstruktion der Hohlwelle durch den Drehkranz von Gelenk Nr. 4 basiert auf http://www.ftcommunity.de/details.php?image_id=34697 . Es werden ft-Originalteile benutzt, allerdings habe ich ein bisschen dremeln und heißkleben müssen. Die Hohlwelle kann ich leider ohne Auseinanderbauen jetzt nicht dokumentieren, das bleibt für später vorbehalten. |


 Gelenk 4 (3932)
Gelenk 4 (3932)