

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Robot arm with 6 degrees of freedom (bummtschick) | April 2014 | Gelenk 6 (3906)
 Gelenk 5 (3905)
Gelenk 5 (3905)
|
Gelenk 6 (3906) |
Gelenk 6 (3907)

|
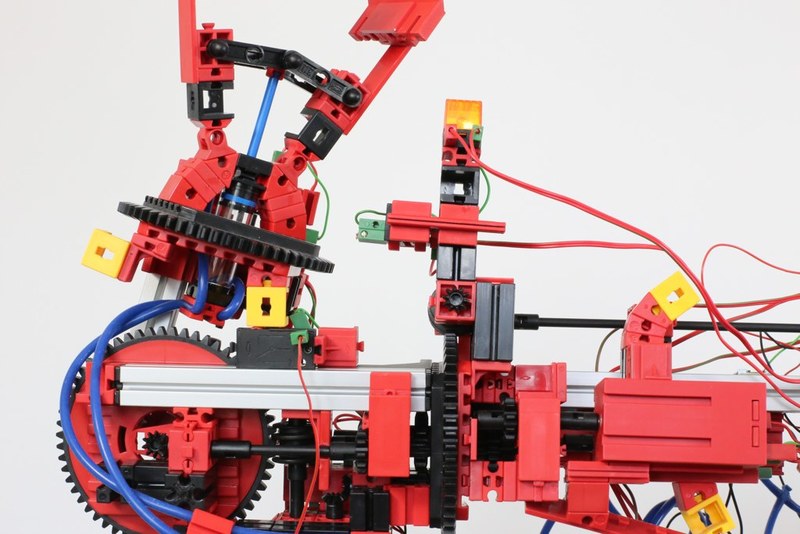
| Beschreibung: | Gelenk 6 rotiert den Greifer selbst, so dass man Teile in verschiedenen Positionen greifen kann. Hier sind am meisten Zahnräder am Werk: angetrieben wird Gelenk 6 tatsächlich von dem hinteren der beiden Encodermotoren vor Gelenk Nr. 4. |
| Hinzugefügt am: | 22.04.14 16:15 |
| Konstrukteur: | bummtschick |
| Fotograf: | bummtschick |
| Hinzugefügt von: | bummtschick |
|
||||