

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Roboterarm (StefanL) | Roboterarm (neu) | Roboterarm 11
 Roboterarm 10
Roboterarm 10
|
Roboterarm 11 ")
|
Roboterarm 12

|
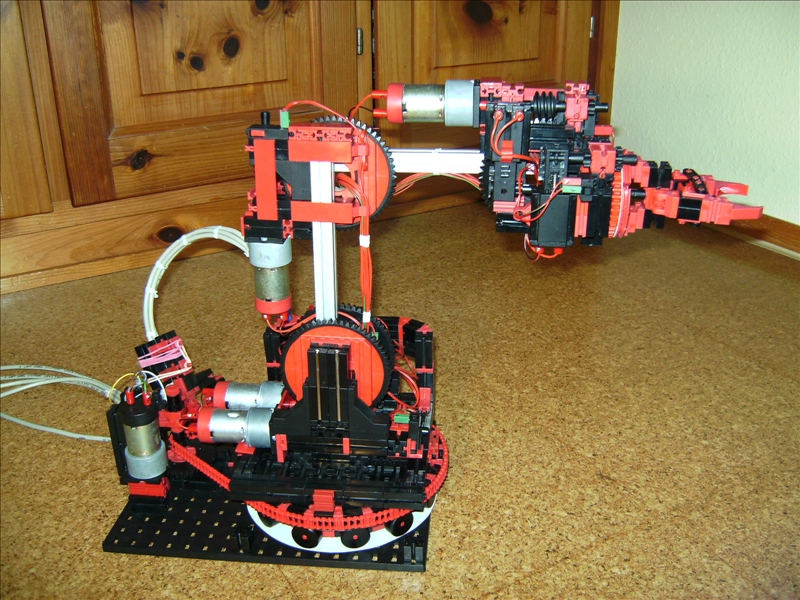
| Beschreibung: | Habe jetzt einen Schneckenantrieb statt dem Direktantrieb drangebaut da der Direktantrieb zu schwach und zu ungenau war. Einen neuen Greifer hat er auch bekommen. |
| Hinzugefügt am: | 28.09.08 13:58 |
| Konstrukteur: | Stefan Lehnerer |
| Fotograf: | Stefan Lehnerer |
| Hinzugefügt von: | StefanL |
|
||||||||||