|
Autor:
|
Kommentar:
|
uffi
17.02.08 16:14
|
Ja, mit schnellen Impulsen kommt Robo Pro an seine Grenze. Wie wärs jetzt mit einer Microcontroller-Steuerung, z.B. diese hier:
freenet-homepage.de/uffmann/Electronics.html#Chapter5
|
| |
uffi
17.02.08 16:16
|
hier der vollständige Link (man kann ja leider nicht mehr bearbeiten nach dem Posten):
http://freenet-homepage.de/uffmann/Electronics.html#Chapter5
|
| |
remadus
17.02.08 16:58
|
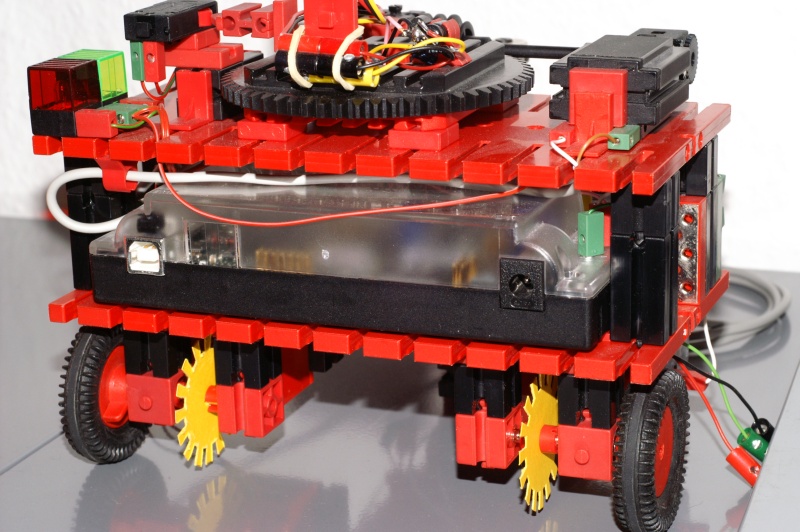
Dafür habe ich ja noch den "großen" Labyrinthroboter. Der odometriert derzeit mit 2000 Impulsen pro Radumdrehung, während dieser hier nur 32 nutzt.
Das macht halt schon einen 486er Prozessor aus.
|
| |
Defiant
17.02.08 18:42
|
Auf die Gefahr hin mich zu wiederholen:
Warum benutzt du nicht die Distanz Sensoren zum wenden?
|
| |
remadus
17.02.08 19:03
|
Das liegt daran, daß dieser Roboter nur einen Distanzsensor hat, den er wie ein Entfernungsradar zur Erkundung der Umgebung benutzt.
Wenn er dann die Abstände zu den Wänden kennt, kann er entscheiden, in welcher Richtung er das Wendemanöver durchführt. In diesem Fall arbeitet die Odometrie wesentlich präziser und ist programmiertechnisch deutlich einfacher.
Wie gesagt, ich benutze die Odometrie nur für kurze Strecken und richte sie immer wieder nach den Distanzsensoren neu aus.
|
| |


 Lab2-11
Lab2-11
")