

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Evolution eines Humanoid, Biped Roboter | Unterschenkel komplett Stellung A
 ...grimmig?
...grimmig?
|
Unterschenkel komplett Stellung A |
Unterschenkel komplett Stellung B

|
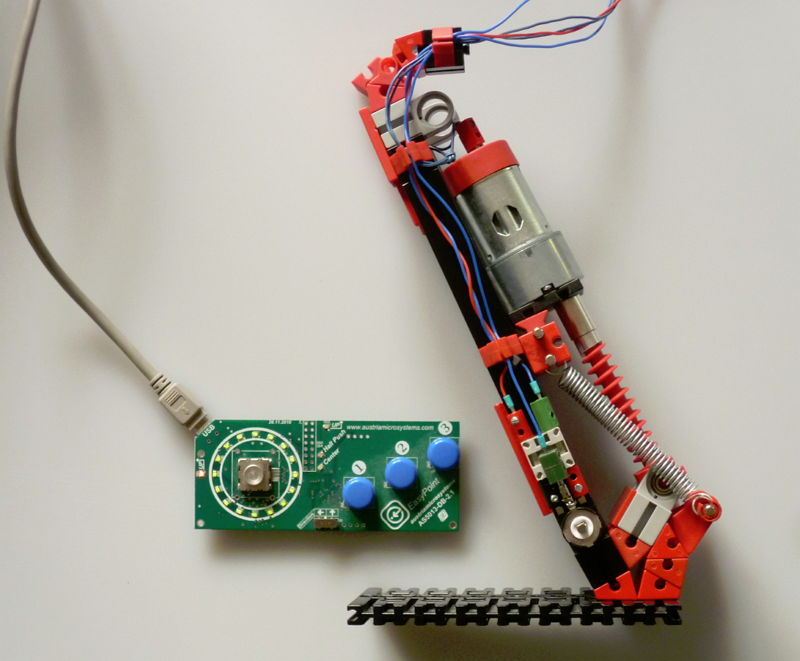
| Beschreibung: | der komplette Unterschenkel mit Antrieb und Potentiometer für die Winkemessung. Hier in der vordersten Stellung.
Daneben meine Bedieneinheit, Joystick |
| Hinzugefügt am: | 03.09.18 16:06 |
| Konstrukteur: | Richard |
| Fotograf: | Richard |
| Hinzugefügt von: | NBGer |
|
||||