

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Samurai Roboter | Samurai Roboter von vorne
Samurai Roboter von vorne ")
|
Samurai Roboter von hinten

|
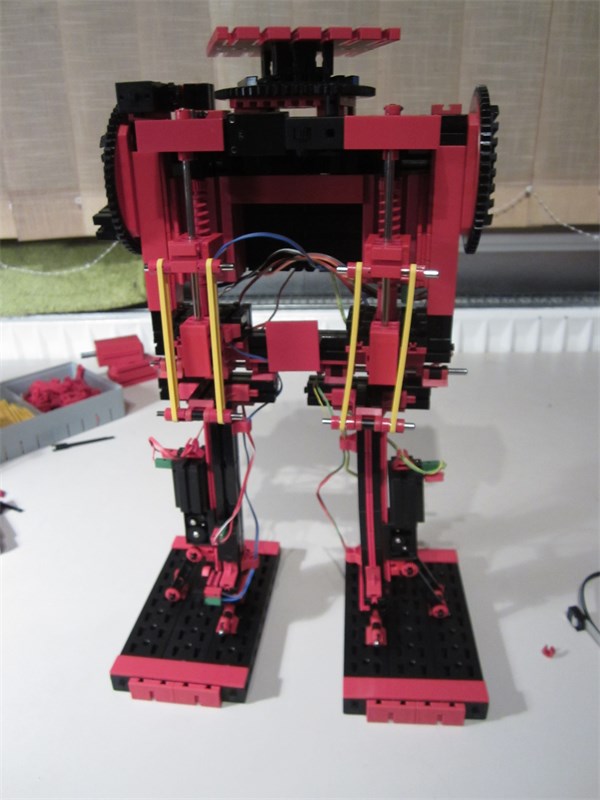
| Beschreibung: | Hallo zusammen,
hier ein Versuch den Samurai Roboter von 2003 weiter zu automatisieren. Leider ist der Versuch gescheitert, da dieser zu "Kopflastig" geworden ist. :-( Die Beine sollten mit Hilfe von 2 Encoder-Motoren angehoben werden. Die Füße, wie in der Bauanleitung, über 2 S-Moteren mit Hubgetriebe. Pdf-Download: http://www.fischertechnik-museum.ch/museum/displayimage.php?album=72&pos=77 |
| Hinzugefügt am: | 15.11.15 19:54 |
| Konstrukteur: | DirkW |
| Fotograf: | DirkW |
| Hinzugefügt von: | DirkW |
|
||||||||||||||