|
Pneumatic Robots : Übersicht
Mit dem ft-Konstruktionskasten "Pneumatic Robots" werden vier Robot-Modelle
angeboten. Hier gibt es mit dem Päckchen PneuRobs.ZIP die
Programme dafür.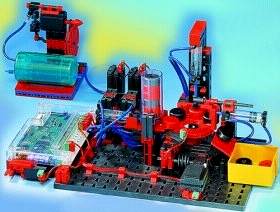
 Die
Robot-Programme sind meist recht einfach gehalten und eignen sich auch gut für den
Einstieg in die Programmierung mit dem fischertechnik Interface und den
Programmiersprachen Delphi oder Visual Basic. Sie lehnen sich recht eng an die mit dem
Konstruktionskasten gelieferten LLWin-Programme an. Eine Die
Robot-Programme sind meist recht einfach gehalten und eignen sich auch gut für den
Einstieg in die Programmierung mit dem fischertechnik Interface und den
Programmiersprachen Delphi oder Visual Basic. Sie lehnen sich recht eng an die mit dem
Konstruktionskasten gelieferten LLWin-Programme an. Eine
Ready To Run Version ist alternativ verfügbar.
Das sind im Einzelnen :
- Modell : Pneumatische Tür
- Betriebsprogramm PneuTuer für Delphi4 und Visual Basic 6
- Modell : Sortieranlage
- Betriebsprogramm PneuSort für Delphi4 und Visual Basic 6
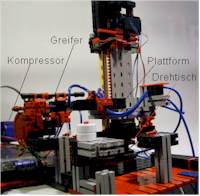
- Modell : Greifer
- Betriebsprogramm PneuGreif für Delphi4 und Visual Basic 6
- Modell : Bearbeitungszentrum
- Betriebsprogramm PneuBeaZ für Delphi4 und Visual Basic 6
Die Programme haben den Charakter von Beispiel-Programmen, die der eigenen Kreativität
Vorschub leisten sollen. In allen Programmen wurde mit dem seriellen Interface an COM1
gearbeitet, das ist ggf. in der Source zu ändern (OpenInterface "COM1" ->
"COM2" ... "LPT2"). In einigen der LLWin-Programme wurde das
Bedienterminal angezeigt, in den Programmen hier wurde darauf verzichtet. Das Päckchen
umFish.ZIP enthält sprachspez. ein InterfacePanel, das in das Programm leicht integriert
werden kann. Ebenso bieten sich gegenüber der an LLWin-orientierten vorliegende Version
eigene Erweiterungen an :
- durchgängige Verwendung des ResetTasters (zusätzlicher NotHalt)
- (End)Taster anstelle von Wait-Befehlen (könnte Ablauf beschleunigen)
- Button zu Auslösen von Einzelfunktionen (Unterprogrammen)
- Eine Anzeige des InterfaceStatus.
- Statt der Wait-Befehle EndTaster einbauen (und abfragen), bringt mehr Tempo in den
Ablauf. Geht auch in Verbindung mit den Sofakissen (Betätiger) der blauen (alten) Serie.
Bei dem Umgang mit den Modellen sind mir ein paar Dinge aufgefallen
- Allgemein : Verkabelung prüfen (InterfacePanel)
- Tür : das LLWin-Programm hat ein Problem in Sub TuerAuf (Zylinder wird nicht wieder
freigegeben)
- Sortieranlage : Die Schieberfunktion ist empfindlich, mit dem Schraubendreher ggf.
nachhelfen, vielleicht hilft auch ein zusätzlicher Abweiser auf der Schieberführung.
- Greifer : Die Polung des Reset-Tasters habe ich vertauscht (Reset jetzt : drücken)
Der Greiferarm geht recht temperamentvoll zuwerke, ich habe ein (altes) Reduzierventil in
die Zuleitung eingebaut.
- Bearbeitungszentrum : Beim Drehtisch jedes der Trenn- und Kontaktstücke auf Schließen
des Tischtasters kontrollieren, der Taster reagiert nur bei sehr genauer Einstellung.
Die Programme liegen zusammen in dem Päckchen PneuRobs.ZIP
als Source vor. Dem Download-Päckchen liegt ein Kopie von umFish.DLL bei, meist reicht
das zum Betrieb. Handbuch und ergänzende Files für WinNT und das parallele Interface
sind in umFish.ZIP enthalten. Ebenso ist dort das InterfacePanel
enthalten, das bei der Kontrolle der Modellverkabelung gute Dienste leisten kann. Bei
einigen Modellen wurde die ActiveX.DLL FishN632.DLL genutzt hier ist zusätzlich ist das
Handbuch FishMa31.ZIP und eines der Päckchen FishN632.ZIP (VB6) oder FishK532.ZIP
(VB5) erforderlich.
Die Robot-Programme laufen unter Windows 95 und 98 sowie Windows NT4 mit
dem seriellen und dem parallelen ft-Interface.
 Und hier noch ein Link zu einem interessanten Greifarmroboter von Markus
Lelie : www.lelie.de/markus/fischer.htm
Programm in Visual Basic. Und hier noch ein Link zu einem interessanten Greifarmroboter von Markus
Lelie : www.lelie.de/markus/fischer.htm
Programm in Visual Basic.
|