|
Autor:
|
Kommentar:
|
Ma-gi-er
10.06.07 14:34
|
Ich bewundere wie du da alles schön reingebracht hast!
|
| |
schnaggels
11.06.07 11:08
|
"Eine richtige Odometrie muß ja nicht unbedingt sein" also so eine Aussage von DIR überrascht jetzt aber :)
Hatte schon gegrübelt wie du die hochauflösenden Wegsensoren mit dem Interface ausliest...
Es gab früher übrigens Schalträder mit 5 Zähnen wenn dir das weiterhilft? (Ich glaube im Profi Computing Kasten drin)
Gruß,
Thomas
|
| |
remadus
27.06.07 11:29
|
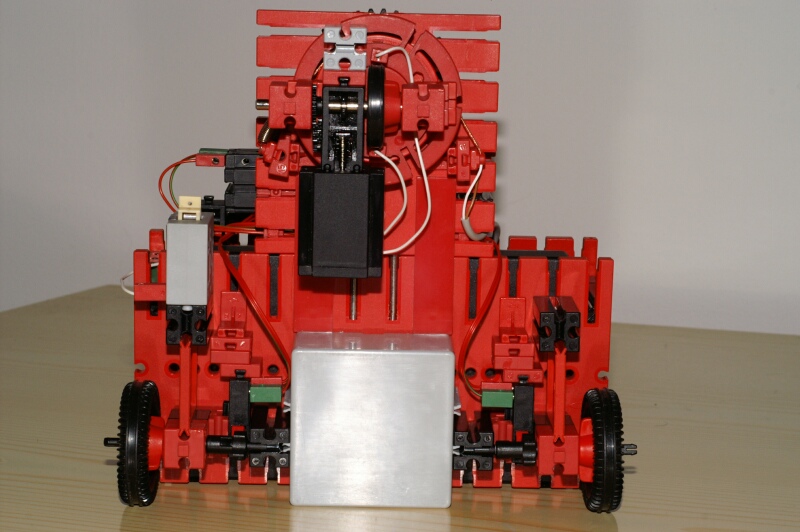
Dieser Roboter richtet sich etwas strenger nach den Anforderungen des Labyrinths. Es reicht, wenn er 30 cm vorfahren kann und das mit 2 cm Auflösung. Kontrollieren soll er das mit dem Entfernungssensor.
Spannend wird das Zusammenführen der Daten, wenn er um eine Kurve fahren soll. Aus den Daten des Rundumsensors errechnet er eine passende Kurve, steuert die Lenkung ein und fährt los. Dabei muß er beobachten, ob das alles paßt, um eine Wankollision zu vermeiden.
Nach welcher Strategie das gehen soll, weiß ich im Augenblick noch nicht.
Bis dann
Remadus
|
| |
|


 Lab2-07
Lab2-07
")