

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | "Blinder"Roboter | Taster für Abgrunderkennung
 Rollen unten am Arm
Rollen unten am Arm
|
Taster für Abgrunderkennung |
Roboter neu

|
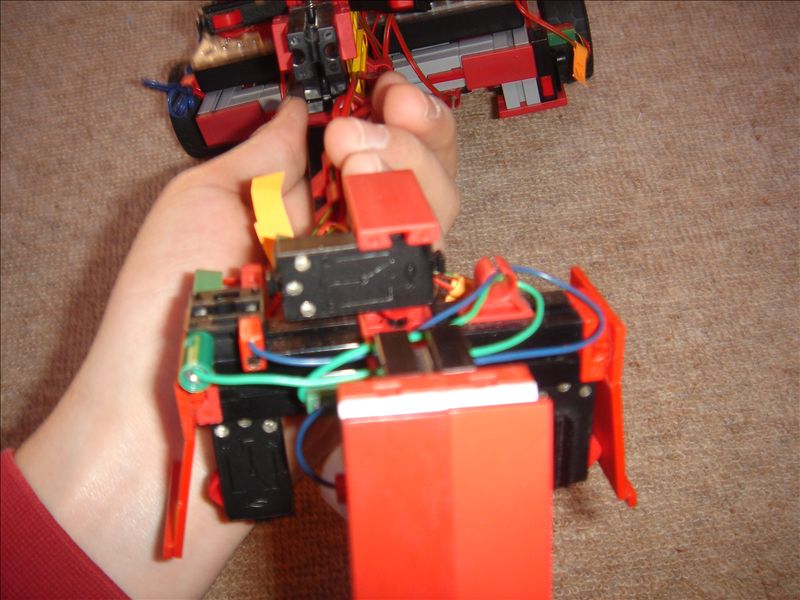
| Beschreibung: | Es geht etwa so wie die Kantenerkennung bei Mobile Robots Set. Es ist eine V-Achse, die den Taster drückt, wenn es Boden hat. |
| Hinzugefügt am: | 04.04.07 10:29 |
| Konstrukteur: | Martin |
| Fotograf: | Martin |
| Hinzugefügt von: | Ma-gi-er |
|
||||