

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Einrad-Roboter | Kugelroboter | Kugelroboter - Fernsteuerung
 Kugelroboter - unten
Kugelroboter - unten
|
Kugelroboter - Fernsteuerung ")
|
Kugelroboter - Fernsteuerung (offen)

|
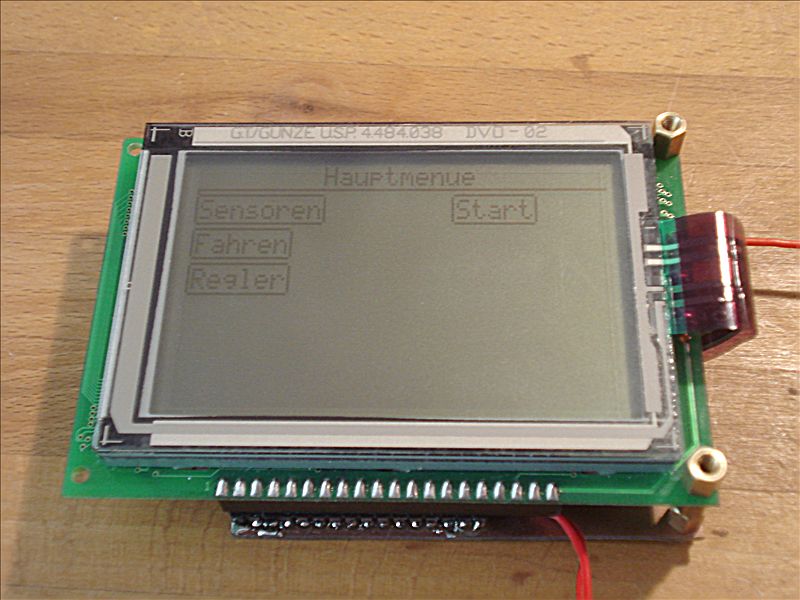
| Beschreibung: | Im wesentlichen besteht die Fernsteuerung aus einem Grafik-Display. (Pollin 120 346). Auch wenn es da nicht steht: das Display hat eine Touch-Folie. Damit kann man sehr gut den Roboter bedienen. Vom Hauptmenü aus kann man verschiedene Funktionen aufrufen:
Sensoren: Eine Art Mini-Oszilloskop. Die Werte der Sensoren des Roboters werden grafisch dargestellt und gleichzeitig über die RS232-Schnittstelle an den PC gesendet. Fahren: Direkte Ansteuerungsmöglichkeit für die Motoren. Z.B um diese zu testen oder einfach nur zu zeigen, dass der Roboter in jede Richtung fahren kann. Regler: Die Regelparameter des PID-Reglers können verändert werden. Sie werden auf dem Roboter gespeichert, nicht in der Fernsteuerung. Start: Balancieren starten. |
| Hinzugefügt am: | 24.07.09 17:57 |
| Konstrukteur: | Jan Käberich |
| Fotograf: | Jan Käberich |
| Hinzugefügt von: | kehrblech |
|
||||||||||||||