

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Experimentelle Antriebe | Omnidirektionales Fahrwerk | von unten
 von rechts
von rechts
|
von unten ")
|
Von der Seite

|
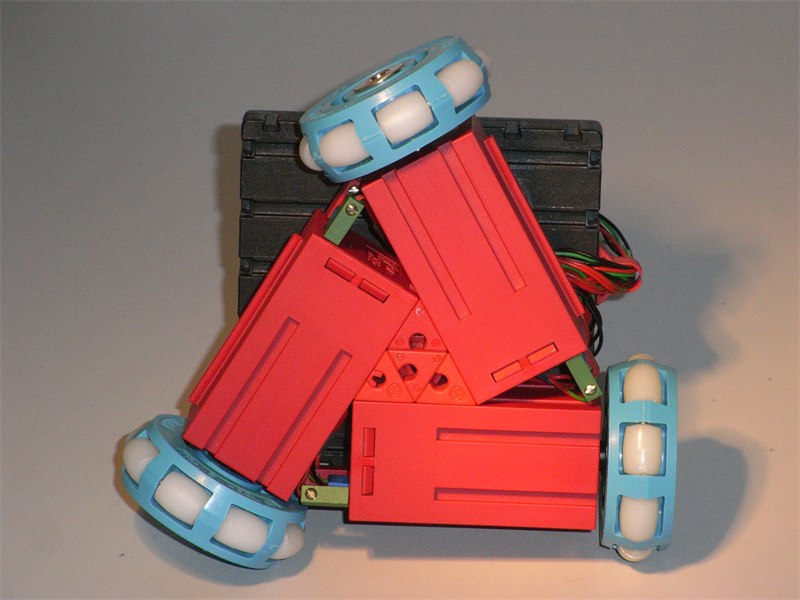
| Beschreibung: | Der Fahrroboter wird von drei Encodermotoren angetrieben. |
| Hinzugefügt am: | 08.09.12 15:23 |
| Konstrukteur: | Jan Werner |
| Fotograf: | Jan Werner |
| Hinzugefügt von: | werner |
|
||||||