

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Auf vier Achsen modifizierter Trainingsroboter | Gesamtansicht 4-Achs-Roboter
| Gesamtansicht 4-Achs-Roboter |
Details zur Drehung um die vierte Achse mit Exzenter-Scheiben

|
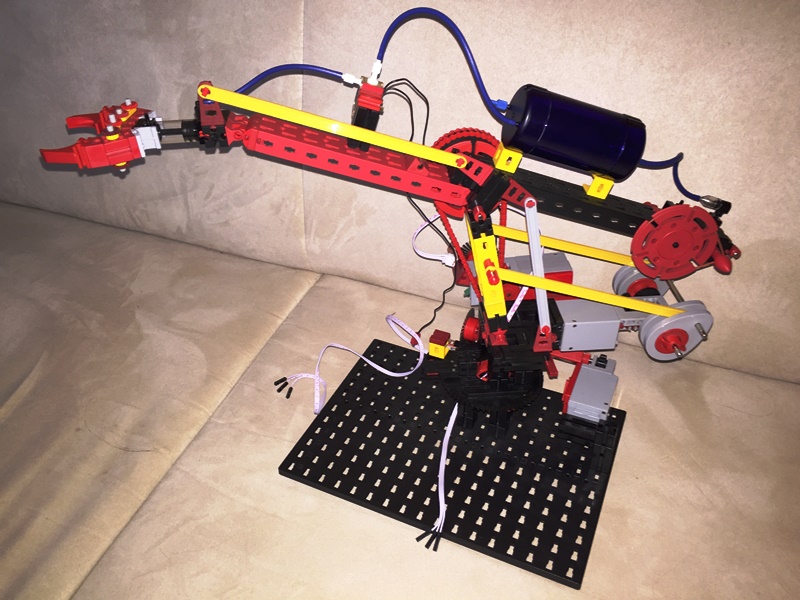
| Beschreibung: | Da ich mit dem Modell nicht zufrieden war, habe ich ein paar Modifikationen vorgenommen:
- Pneumatik-Greifer statt Schneckengetriebe - M-Motoren statt S-Motoren - Gabellichtschranken statt Impulszahnräder + Taster - zusätzliche Drehachse, um den Arbeitsbereich nicht auf eine Kreislinie beschränken zu müssen |
| Hinzugefügt am: | 18.02.15 15:55 |
| Konstrukteur: | Dirk Uffmann |
| Fotograf: | Dirk Uffmann |
| Hinzugefügt von: | uffi |
|
||||