

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Ball Balancing Robot | Drive axle
 Onmi wheels
Onmi wheels
|
Drive axle ")
|
Decoder and sensors

|
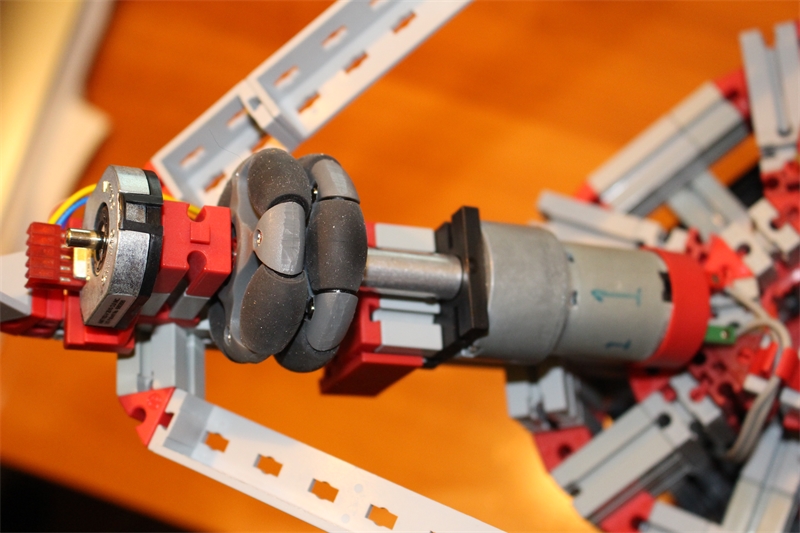
| Beschreibung: | One of the 3 axles. For the first models I used rast axles that were connected to the power motors using a rast connector sleeve (35142). However, there is too much slack in these, and I resorted to metal axles and Graupner 4mm to 5mm shaft connectors (http://www.graupner.de/de/products/3374/product.aspx) to mount them onto the power motors.
Each axle has a quad encoder connected to know its position and speed. These are AMT-103 capacitive encoders by CUIC. They can be set to a wide range of frequencies to suit the limited TX counter inputs, that can realistically handle no more than 500 Hz. I glued them to a Lagerbock or Kupplungsstück 5 (38252), and fit them to the end of the axle. They operate at 5V and produce quad encoder A and B signals. I use the LS7183 IC by LSI Computer Systems to decode these into an up and a down counter. So each wheel uses two TX counter inputs. The TX simply subtracts the two values to find the wheel position. This means I need 2 TXs, as you need 3 axles times 2 counters is 6 counter inputs. Too bad the TX counter inputs don't have a mode to decode the quad encoder signals directly. I presume the TX counter input values are software based. If so, providing a mode that would produce a single counter value out of the quad encoder signals would be a relatively simple solution to implement. I bet ft will never do that. We need open source! For the balancing function you need to know the ball or robot speed in the X and Y direction. This can of course be derived from the position information that the wheel encoders provide, but a Kalman filter (http://en.wikipedia.org/wiki/Kalman_filter) needs to be applied to provide smooth position and speed information. Screen shots of that in a later picture. |
| Hinzugefügt am: | 18.01.14 17:48 |
| Konstrukteur: | |
| Fotograf: | |
| Hinzugefügt von: | winijenh |
|
||||||||||||||