|
Autor:
|
Kommentar:
|
Stefan Falk
10.12.08 18:51
|
Wenn Du das wirklich zum Laufen bringst: SA-GEN-HAFT! Einfach nur irre, was Du in Deinem Alter für Aufgaben bezwingst.
Tief beeindruckt,
Stefan
|
| |
schnaggels
12.12.08 10:30
|
Dem schließe ich mich 100% an, weiter so Jan! Ich wünschte ich hätte neben der Arbeit mehr Zeit für solche Projekte...
Gruß,
Thomas
|
| |
Severin
12.12.08 17:52
|
Hammer Gerät!
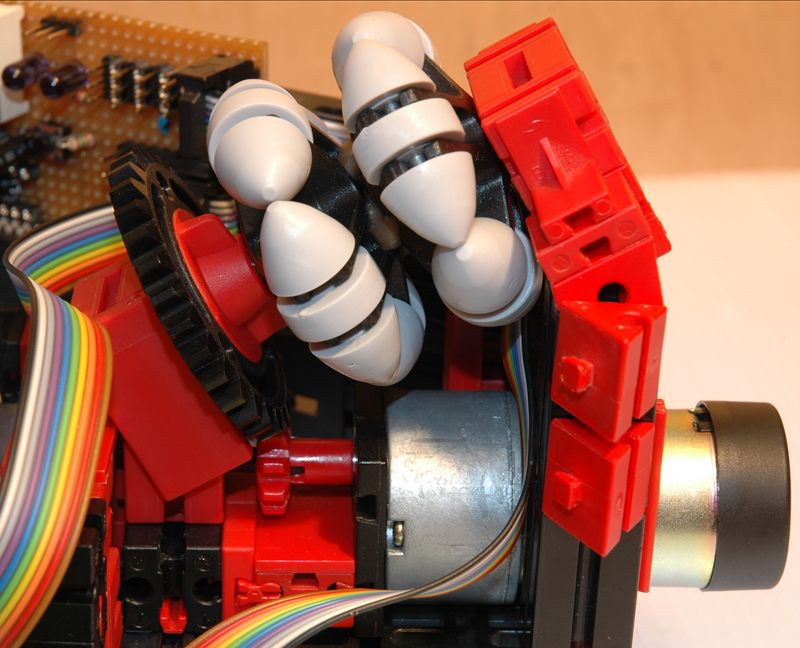
Wo hast du die Omniwheels gekauft?
Ich such schon länger Fischertechnik-passende...
Gruß
Severin
|
| |
Udo2
12.12.08 18:19
|
Hallo Severin,
schau hierzu mal unter www.robotikhardware.de
|
| |
kehrblech
13.12.08 13:27
|
Da habe ich die auch her. fischertechnik-passend sind die leider nicht, sie haben 8mm Achsdurchmesser. Ich habe deshalb die Hülse 31983 hineingeklebt. Auch die Achse selber ist fest mit dem Rad verklebt.
|
| |


 von unten
von unten
")