|
Autor:
|
Kommentar:
|
Stefan Falk
26.08.15 21:10
|
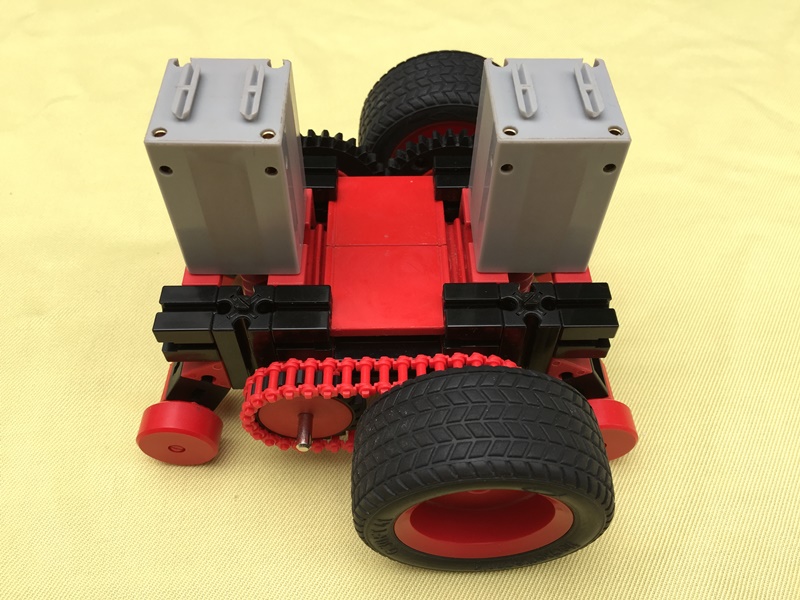
Hast Du mal die Getriebehalter mit Schnecke probiert, um das Fahrzeug etwas langsamer und dafür kräftiger zu bekommen? http://ft-datenbank.de/search.php?keyword=getriebehalter*schnecke
Gruß,
Stefan
|
| |
uffi
27.08.15 09:18
|
Ja, Stefan, hab ich. Ich hab aber keine befriedigende Lösung gefunden, wie ich diese Getriebehalter gegen verrutschen am Motorgehäuse sichern kann und wie ich den Motor gegen wegdrehen oder wegrutschen sichern kann. Mir erschien dann die Lösung mit dem Untersetzungsgetriebe besser, die ich 4 Bilder weiter gezeigt habe.
Gruß, Dirk
|
| |
Dirk Fox
27.08.15 23:05
|
Hallo Dirk,
eine schnuckelige Gleichlaufgetreibe-Variante ist das!
Gegen das Wegrutschten habe ich einen Tipp: Ersetze mal die Winkelsteine 10x15x15 durch Bausteine 7,5, dreh' die Motoren um 90° und befestige die Bausteine 7,5 mit einem Verbindungsstück 15 an den BS 15 - da rutscht nix mehr weg. Funktioniert bei meinem kleinen Spurfolger prächtig!
Gruß, Dirk
|
| |
uffi
28.08.15 16:19
|
Hallo Dirk,
Dein Vorschlag ist sicher ein guter Tipp und funktioniert bestimmt. Bei der hier gezeigten Variante gibt es aber gar kein Problem mit Wegrutschen.
Die Diskussion hier bezog sich darauf, eine weitere Getriebeuntersetzung mittels einer zusätzlich eingefügten Getriebeschnecke vorzunehmen, die zwischen Motor und Differential angebracht wird. Diese hat dann ein Rutschproblem.
Gemeint ist also ein modifizierter Antrieb, wie Du ihn bei Deinem Wall-E in erster Version gemacht hast. Hattest Du da nicht auch ein Rutsch- und Ratter-Problem und hast daher eine Version 2 mit neuen Differentialen und Motoren gemacht?
Gruß, Dirk
|
| |
Dirk Fox
07.09.15 22:17
|
Hallo Dirk,
sorry, da habe ich tatsächlich nicht genau gelesen... natürlich ist Deine Konstruktion ebenso stabil gegen Wegrutschen. Vielleicht habe ich aber eine Idee für den Getriebehalter - muss ich aber erst noch ausprobieren.
Beim Wall-E habe ich es ohne Geratter und Verrutschen hinbekommen, weil eine Kombination von Motor und Getreibehalter bombenfest saß.
Gruß, Dirk
|
| |
uffi
30.09.15 16:57
|
Hallo Dirk,
hast Du Deine Variante mit Getriebehalter inzwischen ausprobiert?
Danke und Gruß, Dirk
|
| |
|


")