|
Autor:
|
Kommentar:
|
uffi
08.07.08 00:31
|
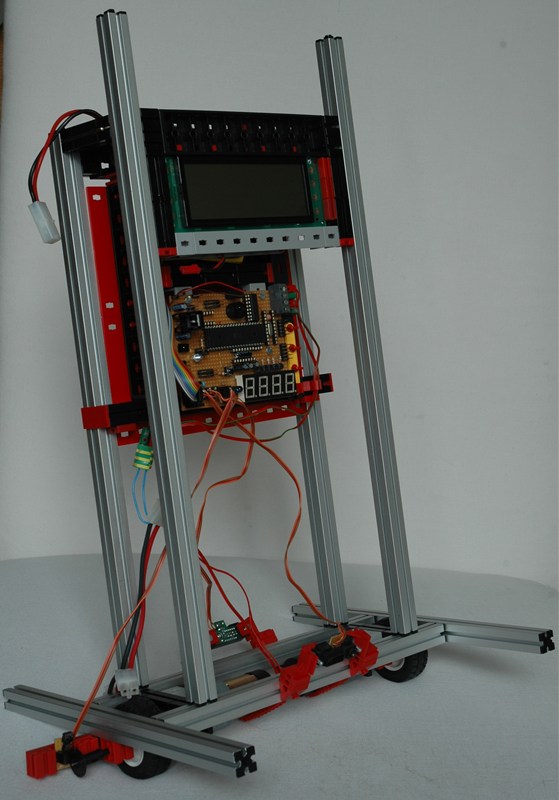
Hallo kehrblech,
sieht groß und schwer aus. Hast Du ein Video vom Balancieren? Welche Sensoren hast Du benutzt?
Vielleicht interessiert Dich ja mein Zweirad-Balancierer aus Fischertechnik:
http://home.arcor.de/uffmann/ARTIST.htm
Die mechanische Konstruktion ist anders (kleiner, leichter), die Elektronik ähnlich.
Gruß, uffi
|
| |
kehrblech
08.07.08 12:51
|
>>sieht groß und schwer aus.
Ist er auch. Besonders schwer, die Motoren müssen ordentlich arbeiten.
Als Sensoren benutze ich nur zwei IR-Abstandssensoren, ein Gyro ist aber schon bestellt.
Mit einem Video sieht es schlecht aus. Ich habe schon mal versucht ihn mit einem Handy zu filmen, aber da konnte man nicht viel erkennen.
|
| |
kehrblech
09.10.08 16:42
|
Jetzt habe ich es endlich geschafft ein Video zu machen und hochzuladen. Link]Hier[/URL] ist es.
|
| |
kehrblech
09.10.08 16:44
|
Was ist denn mit dem Link passiert?
vielleicht klappt es jetzt:
Video
|
| |
Robo
21.10.11 13:12
|
Er ist cool
|
| |
|


")