

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Mobiler Roboter mit Gleichlaufgetriebe | Beide Antriebe
 Antrieb des Fahrdifferenzials
Antrieb des Fahrdifferenzials
|
Beide Antriebe ")
|
Befestigung der Power-mots

|
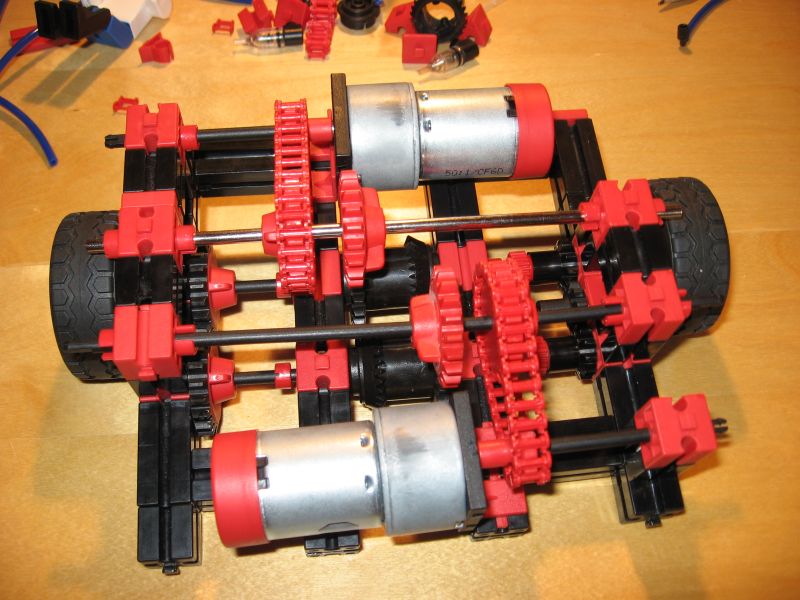
| Beschreibung: | Hinzu kommt der Antrieb des Lenkdifferenzials. Es ist das selbe Prinzip wie beim Fahrdifferenzial. |
| Hinzugefügt am: | 04.12.06 16:39 |
| Konstrukteur: | fitec |
| Fotograf: | fitec |
| Hinzugefügt von: | fitec |
|
||||||