

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Präzisions-Industrieroboter
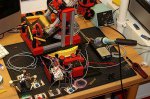
Bei diesem Projekt soll ein Handhabungsroboter herauskommen, der seine Positionen sicher und exakt erreicht. Dafür wird ein eigenes, fischertechnik-taugliches Konzept entwickelt.
In dieser Kategorie: 14 Bild(er) auf 2 Seite(n). Sie sehen: Bild 1 bis 9.
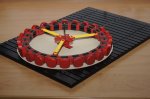 01-Rollenkranz als Basis (remadus) Präzisions-Industrieroboter Kommentare: 0 |
 02-Die erste Achse (remadus) Präzisions-Industrieroboter Kommentare: 2 |
 03-Die zweite Achse (remadus) Präzisions-Industrieroboter Kommentare: 3 |
 04-Achsen drei, vier und fünf (remadus) Präzisions-Industrieroboter Kommentare: 2 |
 05-Alle Achsen im Überblick (remadus) Präzisions-Industrieroboter Kommentare: 1 |
 06-Verkabeln-1 (remadus) Präzisions-Industrieroboter Kommentare: 1 |
 07-Verkabeln-2 (remadus) Präzisions-Industrieroboter Kommentare: 1 |
 08-Verkabeln-3 (remadus) Präzisions-Industrieroboter Kommentare: 0 |
 09-Verkabeln-4 (remadus) Präzisions-Industrieroboter Kommentare: 1 |
1 2 weiter »|