

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Robot arm with 6 degrees of freedom (bummtschick) | April 2014 | Gelenk 3 (3891)
 Gelenk 2 (3890)
Gelenk 2 (3890)
|
Gelenk 3 (3891) |
Gelenk 3 (3892)

|
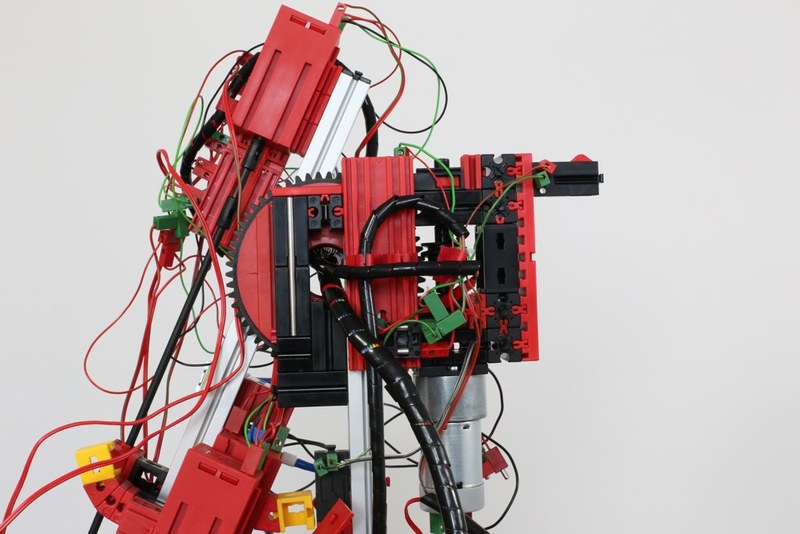
| Beschreibung: | Gelenk 3 ist hier in Nullposition, der Endtaster unten Mitte im Bild ist gedrückt. Gelenk 3 wird von einem grauen Powermotor (20:1) angetrieben, ist also schneller als Gelenk Nr. 2 mit dem roten Powermotor. (Gelenk 2 wurde für bessere Sicht zuvor etwas ausgefahren, so dass Armteil Nr. 2 aufrecht steht.) |
| Hinzugefügt am: | 22.04.14 16:15 |
| Konstrukteur: | bummtschick |
| Fotograf: | bummtschick |
| Hinzugefügt von: | bummtschick |
|
||||