

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Robot arm with 6 degrees of freedom (bummtschick) | April 2014 | Gelenk 2 (3890)
 Gelenk 2 (3889)
Gelenk 2 (3889)
|
Gelenk 2 (3890) |
Gelenk 3 (3891)

|
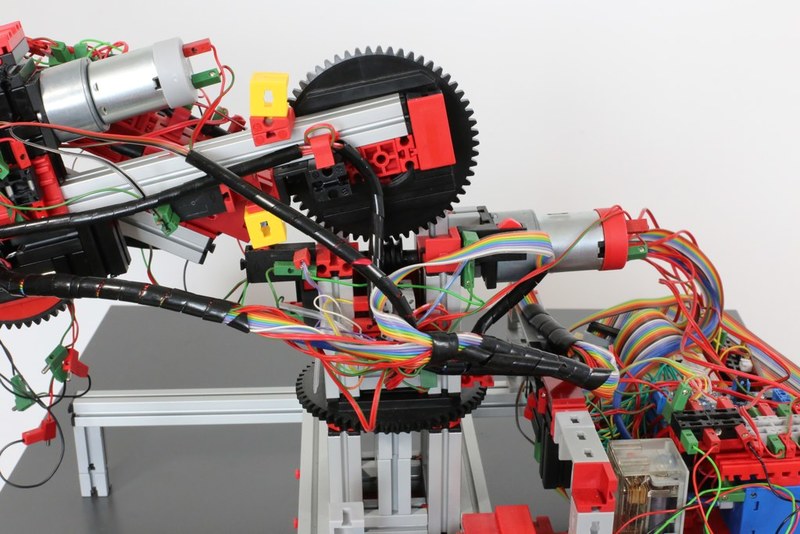
| Beschreibung: | Hier ist das Gelenk 2 voll ausgefahren (auf 100%): jetzt ist der Endtaster links von dem anderen Statikstein gedrückt. Der obere gelbe Statikstein drückte im vorigen Bild den Endtaster rechts. |
| Hinzugefügt am: | 22.04.14 16:15 |
| Konstrukteur: | bummtschick |
| Fotograf: | bummtschick |
| Hinzugefügt von: | bummtschick |
|
||||