|
Autor:
|
Kommentar:
|
charly
09.05.05 23:13
|
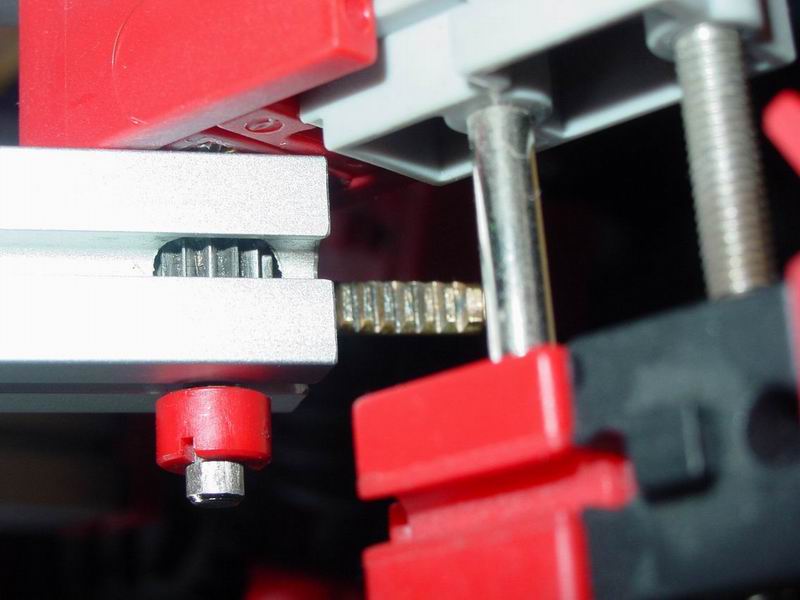
Innenliegende Paralellführung/Schwenkachse f. Greifzange
Meine erste Anwendung, dafür hab ich die
Zahnstangen zuerst gebraucht.
Mein Trainingroboternaher Robi sollte die
Greifzange schwenken konnen, das ganze sollte vorn nicht zu klobig werden.
Das Aluprofil ist 2x mit 4mm durchgebohrt und von einer Seite mit 11mm aufgefräst, so daß ein Z16 Platz hat. Die Zahnräder greifen in eine in der unteren Nut liegende Zahnstange, die Paralellführung bzw. Schwenkbewegung von der oberen Achse
auf die Greifzange überträgt.
Sehr stabil, superklein, spielarm!
Der Antrieb der Schwenkachse kann von ganz
hinten kommen.
|
| |
schnaggels
10.05.05 08:41
|
super Feinmechanik!
sehr kompakt, kleiner geht das wohl kaum :)
|
| |
|


 Zahnstangenfräse 2 Draufsicht
Zahnstangenfräse 2 Draufsicht
")