

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Uhren | FT-DCF77-Kuckucksuhr | RTC mit dem DS1307 in Kombination mit dem Kuckuck-Antrieb funktioniert nicht
 Kuckucksuhr - Details
Kuckucksuhr - Details
|
RTC mit dem DS1307 in Kombination mit dem Kuckuck-Antrieb funktioniert nicht ")
|
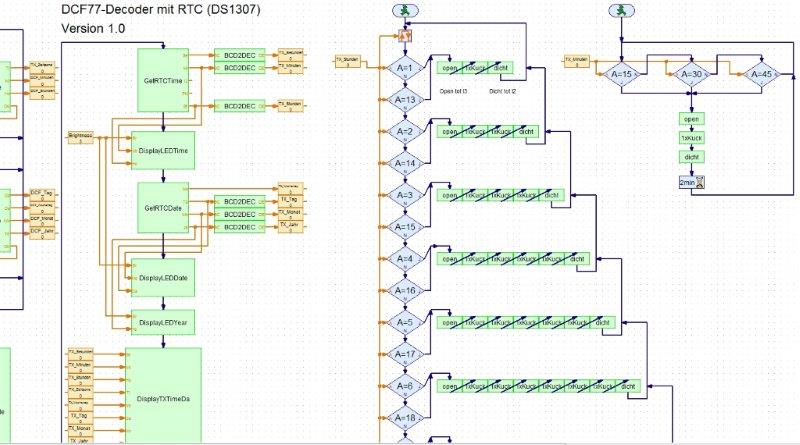
| Beschreibung: | Stimmt es das es im neuen RTC_Treiber DS1307 v1.0.rpp die variabele TX-Minuten gibt statt CLK-Minuten im (alte) DCF77-Decoder v2.1
und TX-Stunden statt CLK-Stunden ? Die Real Time Clock - RTC mit dem DS1307 funktioniert bei mir prima ! ...... In Kombination mit dem Kuckuck-antrieb gibt es aber Problemen die zusammen hangen mit die variabele TX-Stunden. Es gleicht als ob die variabele TX-Stunden nicht stabil ist...als ob es nur ein kleines Moment 0 ist und dann wieder die richtige Stunde....???????......und deswegen hort der Kuckuck nicht auf. Was habe ich falsch gemacht ? Beim alten Programm DCF77-Decoder v2.1 funktioniert die Kuckuck Problemlos........(es gab nur problemen beim niedrige Empfangt). |
| Hinzugefügt am: | 25.11.13 19:57 |
| Konstrukteur: | Peter Poederoyen NL |
| Fotograf: | Peter Poederoyen NL |
| Hinzugefügt von: | peterholland |
|
||||||||||