|
Autor:
|
Kommentar:
|
Stefan Falk
02.06.06 14:25
|
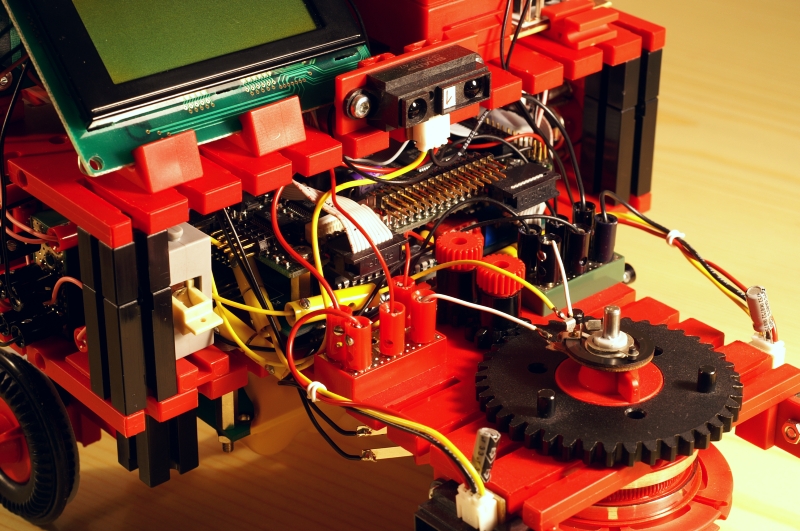
Was für wunderschöne Bilder in Profiqualität! Das sieht ja aus wie aus dem Hochzeitsfotostudio ;-)
Wird denn der Poti wirklich nur von den beiden weißen Anschlussdrähten festgehalten?
Gruß,
Stefan
|
| |
remadus
06.06.06 12:43
|
Das Poti wird tatsächlich nur von den Drähten gehalten. Da das nicht beliebig steif ist, dreht sich das Poti um ungefähr 1 Grad mit. Genauer muß der Winkel nicht gemessen werden, es gibt ja noch die Messung des Fahrwegs durch die Hinterräder.
Kameratechnisch habe ich mich erheblich verbessert. Obige Aufnahme entstand mit einem Makroobjektiv an einer Digi-SLR.
|
| |
Fredy
05.12.07 17:32
|
Hi,
du hast den Kondensator 1 µF direkt an den Sensor gesteckt(Signal/Masse). Ist das richtig, ums so näher den Kondensator an dem Sensor ist, um so weniger schwankungen hat man ?
Gruß Frederik
|
| |
remadus
10.12.07 19:47
|
Ja, zunächst habe ich das so gemacht.
Mittlerweile lasse ich die einfach weg, weil sie nutzlos sind. Der Tiefpaß am Eingang des DA-Wandlers bringt die echte Hilfe.
|
| |
Defiant
10.12.07 22:34
|
Tiefpass? Bringt der was?
Ohne komm ich mit dem GP2D12 am RoboInt auf einen unterschied von 2. Ich kann mir nicht wirklich vorstellen, daß man den Wert genauer bekommt.
|
| |
Fredy
10.12.07 22:58
|
Hallo,
Ohne Tiefpass bekomme ich werde im Schwankungsbereich von 100 und mehr. mit Tiepass sind es nur so 15-20.
Aber die Defiant da auf 2 kommt ohne Tiefpass ist mir rätselhaft.
Gruß Frederik
|
| |
remadus
14.12.07 16:56
|
Ganz wichtig beim RoboInterface: den nicht gebrauchten Analogeingang auf Masse legen. Dann stört er den anderen Eingang nicht.
Bei dem Roboter oben ist das anders: da hängen die Abstandssensoren auf einem 12-AD-Wandlerboard, werden mehrmals ausgelesen, dann gemittelt. Die Genauigkeit ist voll ausgereizt.
|
| |


 Labyrinthroboter
Labyrinthroboter
")