

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Labyrinthroboter | Labyrinthroboter
 Teilscheibe am Hinterrad
Teilscheibe am Hinterrad
|
Labyrinthroboter |
Labyrinthroboter - Lenksensor

|
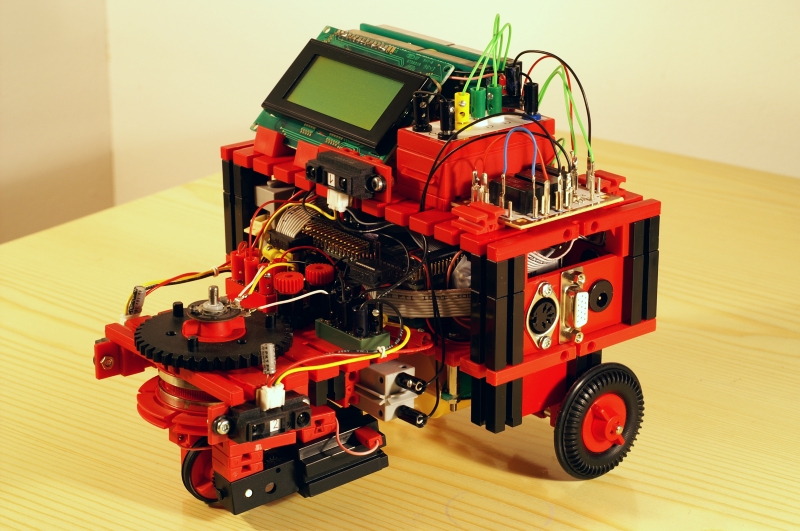
| Beschreibung: | Hier der fast fertige Aufbau, bei dem nur noch die Radsensoren fehlen.
Oben: Display, dahinter Netzgeräte (+5V, +12V, -12V), daneben die PWM-Steuerung für den Fahrmotor von Thkais (Danke) und die Relaissteuerung für den Lenkmotor. Mittelebene: vorne das Lenkzahnrad mit Potentiometer zur Lenkwinkelmessung, dahinter Rechner mit Multi-IO-Board, Stromverteiler und Außenanschlüsse für Tastatur, VGA-Monitor und Ladestrom. Unten: Gelenkte Antriebsachse mit Schleifring für Stromübertragung auf den schwarzen Antriebsmotor, grauer Lenkmotor und dahinter der Akku. Gesamtgewicht bis jetzt knapp drei Pfund |
| Hinzugefügt am: | 02.06.06 11:33 |
| Konstrukteur: | Remadus |
| Fotograf: | Remadus |
| Hinzugefügt von: | remadus |
|
||||