

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Roboter-Arme und -Greifer | Robot arm with 6 degrees of freedom (bummtschick) | April 2014 | Gelenk 4 (3898)
 Gelenk 4 (3897)
Gelenk 4 (3897)
|
Gelenk 4 (3898) |
Gelenk 4 (3899)

|
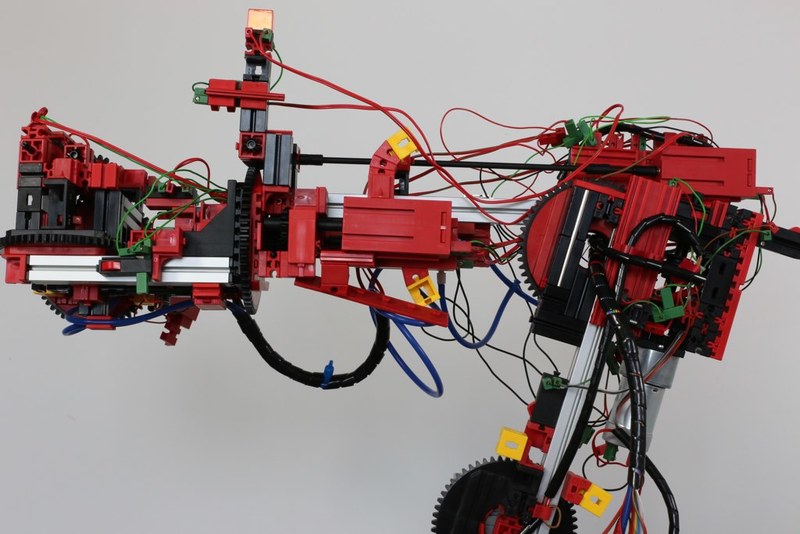
| Beschreibung: | Gelenk 4 ca. 25% gedreht. Man beachte die beiden Encodermotoren in der Mitte (es sind zwei, der hintere ist nur schlecht sichtbar); diese treiben die Gelenke 5 und 6 über eine Hohlwelle durch den Drehkranz von Gelenk Nr. 4 an (besser zu sehen in Bild 3932). |
| Hinzugefügt am: | 22.04.14 16:15 |
| Konstrukteur: | bummtschick |
| Fotograf: | bummtschick |
| Hinzugefügt von: | bummtschick |
|
||||