

ftCommunity | Suche
Suchergebnisse
Kategorien im Bilderpool:
![]() Bilder zum Sortieren
Bilder zum Sortieren
![]() Vermessungsroboter
Vermessungsroboter
![]() Messtechnik
Messtechnik
![]() ft-Funkuhr (DCF77)
ft-Funkuhr (DCF77)
![]() Monster Truck V2
Monster Truck V2
![]() Minitaster-MATRIX 3x4
Minitaster-MATRIX 3x4
![]() Wire Cutter / Kabelschneider
Wire Cutter / Kabelschneider
![]() Mobiler Roboter mit Gleichlaufgetriebe
Mobiler Roboter mit Gleichlaufgetriebe
![]() Turm von Hanoi - Roboter Computing 39495 + c64 + Interface C64
Turm von Hanoi - Roboter Computing 39495 + c64 + Interface C64
![]() BBC Buggy
BBC Buggy
![]() Autonomes Fahrzeug
Autonomes Fahrzeug
![]() fischertechnik Pinball
fischertechnik Pinball
![]() Evolution eines Humanoid, Biped Roboter
Evolution eines Humanoid, Biped Roboter
![]() Free Fall Tower
Free Fall Tower
![]() Kettenflitzer
Kettenflitzer
![]() Bau- und Landmaschinen
Bau- und Landmaschinen
![]() Achterbahn (wert)
Achterbahn (wert)
![]() Aufbewahrung und Arbeitsplatz
Aufbewahrung und Arbeitsplatz
![]() Konstruktionswettbewerb 2008-04: Katapult
Konstruktionswettbewerb 2008-04: Katapult
![]() Vorbildfotos
Vorbildfotos
![]() Roboterarm auf Schiene
Roboterarm auf Schiene
![]() Motorisiertes Sperrdifferenzial
Motorisiertes Sperrdifferenzial
![]() Schwertransport
Schwertransport
![]() MarMacs FluSi 2
MarMacs FluSi 2
![]() Baugruppen
Baugruppen
![]() Geländewagen (Michael K.)
Geländewagen (Michael K.)
![]() Licht-und Spursucher mit Hindernis-und Kantenerkennung
Licht-und Spursucher mit Hindernis-und Kantenerkennung
![]() IC-Praktikum
IC-Praktikum
![]() Geländewagen Nr. 2 (Michael K.)
Geländewagen Nr. 2 (Michael K.)
![]() Fahrzeuge mit Fremdmotoren
Fahrzeuge mit Fremdmotoren
![]() Heikos Sortierung
Heikos Sortierung
Bilder im Bilderpool:
 Spiegelreflexkamera EOS (DirkW) Modelle fotografieren und filmen Kommentare: 0 |
 Hängebahn Zugtest (TiloRust) Schrägseilbrücke (340cm) Kommentare: 0 |
 Absolutwertgeber / Winkelmessung (NBGer) Evolution eines Humanoid, Biped Roboter Kommentare: 0 |
 Der Prototyp (H.A.R.R.Y.) Gummibandauto Kommentare: 0 |
 Kamera und Sensorfelder (hamlet) Othello Roboter Kommentare: 0 |
 Waage vertauscht belastet - Zeiger (H.A.R.R.Y.) Experimenteller Nachweis Dunkler Materie Kommentare: 3 |
 bagger (nicolas kurz) schleppschaufelbagger Kommentare: 0 |
 Ventile (Stefan Rm) 4 Zylinder Axialkolbenmotor Kommentare: 0 |
 Transformer - Gesamtansicht (Dirk Fox) Modelle von Jens Lemkamp Kommentare: 0 |
 Reedkontakte am Keksdrucker (ftpi) Unsere Modelle Kommentare: 0 |
 Reedkontakt (ftpi) Keksdrucker Kommentare: 0 |
 Gesamtüberblick (lemkajen) Aquarium Kühlanlage Kommentare: 0 |
Downloads:
| Bezeichnung | Autor | Format | Beschreibung | Größe | Datum |
| Befehlsfilter | michael K. | Wertet Fahrbefehle für einen 2-Rad Roboter aus und besitzt noch ein paar mehr funktionen als das Beispielprogramm von Robopro | 131 kB | ||
| Gleitender Mittelwert 10 Werte | Niklas Frühauf | 10 berechnete Temperaturwerte werden nach dem FiFo-Prinzip gespeichert ,gemittelt und ausgegeben.Die gemessenen Widerstandswerte(Counts) des Temperatursensors werden über eine Liste in Temperaturen umgewandelt. | 264 kB | ||
| Wetterstation | Niklas Frühauf | A1->Solarzelle I1->Taster mit Impulsrad, an "Windmühle" angeschlossen AX->Temperatursensor mit Max&Min-Werte-Speicherung |
579 kB | ||
| Durchschnitt ausrechner | fitec | Das ist ein Programm welches den Durchschnitt eines Lichtwertes ausrechnen soll. Es funktioniert leider noch nicht. Weil die Erklärung im Forum etwas schwer zu verstehen ist schaut es euch einfach mal an. | 45 kB | ||
| Mittelwerte ausrechnen | Clemy | Dieses Programm kann Mittelwerte ausrechnen. (Die Lösung für fitecs Problem ;)) Es schreibt die Ergebnisse in eine Liste, die dann zur weiteren Verarbeitung dient. Nach jedem einlesen des Analogwertes wird der Mittelwert neu berechnet. |
55 kB | ||
| SinCos UP | Thomas Brestrich (schnaggels) | Sinus und Cosinus Routinen für RoboPro (überarbeitet Version, Original von Jens Mewes lief mit aktueller RoboPro Version nicht mehr...) Integer Werte werden je nach Wertebereich aus Tabelle geladen! |
169 kB | ||
| NTC-Widerstand | swalter | Umrechnungstabelle der Zuordnung Temperatur --> Widerstandswert |
81 kB | ||
| Vorwiderstands Berechnung für LED | Quirin Schweigert | Berechnet den erfordelichen Vorwiderstand für LEDs bei einstelbarer Spannung. (ist noch nicht ganz fertig) PS: Nur in die roten Felder schreiben! In eine Spalte immer die gleichen Werte schreiben! |
20 kB | ||
| Zusammenhang IF-NTC | equester | Durch 65 Messwerte mit dem NTC habe ich den Zusammenhang zwischen Interface-Wert und der entsprechenden Temperatur, bzw. zwischen dem Interface-Wert und dem entsprechenden Widerstand ermittelt. | 205 kB | ||
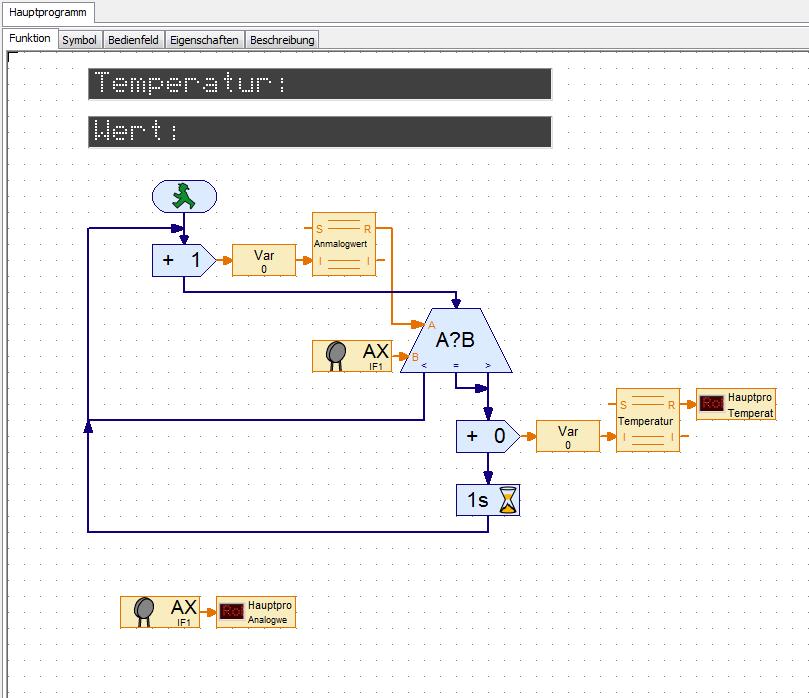
| Umrechnung IF-Wert -> Temperatur | equester | Das Programm wandelt den analogen Wert des NTC-Widerstands in die passende Temperatur um. Dabei verwendet es Listen, die sich auf meine Messwerten zum NTC berufen (siehe Downloads "NTC-Wärmesensor ft"). | 0 Bytes | ||
| Maske-Robot | Peter Damen (Poederoyen NL) | Meiner Maske-Robot "Bor de Wolf" gleicht immer mehr als "Mensch" wenn mehrere Prozessen (Bewegungen) parallel funktionieren wie auch in wirklichkeit. Im Downloadmodus gibt es leider schnell eine entsprechende Fehlermeldung, wenn die Anzahl an Prozessen zu klein ist oder es zu wenig Dataspeicher gibt. Die Größe des Mindestspeicher pro Prozess im Downloadmodus kann man verkleinern bis zum 1281 Bytes statt die 4096-Default-werte. Meine Robopro-Programm mit viele parallel-Prozessen (Bewegungen) funktioniert mit diesem Rezept auch im Downloadmodus. |
618 kB | ||
| Berechnung von Drehzahl und möglichen Impulsen | Thomas Brestrich (schnaggels) | Mal ein Versuch das rechnerisch anzugehen. Die gelben Felder sind für Eingaben gedacht, die Drehzahlen der Motoren sind ja Spannungsabhängig und ich habe einen Wert für etwa ein volles Akkupack genommen. Mit Netzteil halt mehr. Fehler und Amerkungen bitte im Forum unter z.B. http://www.fischertechnik.de/de/fanclub/forum/default.aspx?g=posts&t=3364 posten | 78 kB | ||
| Türme von Hanoi mit Altem Kasten 30554 | Andreas Gürten | Roboterpositionierung über Poti! Den Poti für Hoch und Runter braucht man nicht. Es gibt ein Programm für Handbetrieb. Und ein Programm für Automatikbetrieb. Man startet das Programm. Der Roboter Initialisiert. Dann schiebt man 2 bis 5 Scheiben in Position. Stellt am Regler ein, wieviel Scheiben es sind und drückt den Start-Knopf. Evtl. müssen die Werte angepaßt werden. Poti und Roboterarm in Mittelstellung bringen und dann mit Seiltrommel fixieren. |
45 kB | ||
| Kaputte Programmierung zur Verknüpfung zweier Werte | Patrick P. | jpg | Das ist eine nicht funktionstüchtige Programmierung zur verknüpfung von zwei Werten. | 71 kB | |
| Plotter Treiber | Severin | X und Y Werte haben ihre eigenen Listen. Das Programm gibt nimmt den kürzesten Weg zwischen der aktuellen und der gewünschten Position. Die Konstante am Unterprogramm "Rechner" gibt die maximale Schrittgeschwindigkeit an. Das Programm kann, über die Variablen X-Schub und Y-Schub, die Figur, verschoben, beliebig oft zeichnen. Sieht bei einfachen Figuren gut aus. Über die Maximalgröße der Listen kann eigestellt werden wie oft die Figur verschoben wird. Hat die Figur 4 Koordinaten und soll 4 mal verschoben gezeichnet werden, muss der Maximalwert einer Liste der X oder Y Achse 16 sein. Wenn die Figur nur einmal gezeichnet werden soll 4. Mit 0 ist der Stift oben, mit 1 auf dem Blatt. Im Unterprogramm "Stift" kann die Mechanik der Stiftehalterung eingestellt werden. Es muss für jede Koordinate Angegeben werden in welche Position sich der Stift befindet. Über X-Max und Y-Max muss die Auflösung vom Plotter angegeben werden. z.B.: 1000x570 Sollte der Plotter einen Befehl bekommen der über dem der Auflösung ist, wird dieser nicht ausgeführt und das Programm beendet. |
0.99 MB | ||
| Radar SOftware | T-bear | Dieses Programm ist dafür da, ein Radar zu drehen. Das Radar erkennt vier Richtungen durch ein Impulsrad und zeigt die zuletzt gemessenen Werte im Bedienfeld. |
514 kB | ||
| Sparschwein-Überblick | Fischer fan | Ein Programm mit dem man das Geld im Sparschwein besser überblicken oder zählen kann. Wenn man den selben Quell- und Speicherort für die Liste angibt, bleiben die Werte gespeichert. Einfach im Bedienfeld im Hauptprogramm die Taster anklicken; kein Interface / TX benötigt. Neben den Knöpfen sind zwei Anzeigen, die obere zeigt die Anzahl der Münzen (oder Scheine), die untere den Wert in Euro. Wer Fehler findet, darf sie behalten oder mir bescheidgeben :-) Viel Spaß, Fischer fan |
1.17 MB | ||
| Diverse Widerstandsberechnungen | Thomas Kaltenbrunner (Kalti) | Widerstandsberechnungen leicht gemacht: -Berechnung von Widerständen mit dm Ohmschen Gesetz Gleichstrom für Jeden leicht gemacht -Ersatzwiderstand berechnen einfach Werte eingegeben und der PC berechnet + anschließend Ohmsches Gesetz -Berechnen von in serie geschaltenen Widerständen + anschließend Ohmsches Gesetz |
73 kB | ||
| Betrachtung zum Element | Lutz-Günter Becke | In 4 Tasks werden die Programmdurchläufe gezählt, eigentlich sollten die Zählwerte multipliziert mit ihren jeweiligen Wartezeiten zu annähernd gleichen Ergebnissen führen, aber ... | 82 kB | ||
| Liste durchsuchen | Jan Werner (werner) | Dieses kleine Unterprogramm durchsucht eine Liste nach einem bestimmten Wert. Je nachdem, ob die Suche erfolgreich war oder nicht, verzweigt das Unterprogramm zu dem einen oder anderen Ausgang. War die Suche erfolgreich, wird der erste Index, also die Zeile in der das Programm den Wert zuerst gefunden hat, ausgegeben. Das ist zum Beispiel beim Programmieren von Hochregallagern sehr nützlich: Man kann daduch schnell ermitteln in welchem Fach sich angeforderte Ware befindet oder wo noch ein leeres Fach zum Einlagern ist. Außerdem enthält das Programm eine erweiterte Zählschleife. |
127 kB | ||
| Hilfe für Versuchsauswertung - ft:pedia 3/2013 | H.A.R.R.Y. | Excel-Sheet zur Ermittlung der Motormodellparameter. Für das nötige Hintergundwissen dazu siehe Artikel "Kenndaten der ft-Motoren" in ft:pedia Heft 3/2013. |
50 kB | ||
| Motordaten S-Motor | H.A.R.R.Y. | Kennlinien und -werte für S-Motor (32293) an 9V. Version ohne Tipfehler. |
24 kB | ||
| Motordaten S-Motor mit U-Getriebe | H.A.R.R.Y. | Kennlinien und -werte für S-Motor (32293) mit U-Getriebe (31078 & 31082) an 9V. Version ohne Tipfehler. |
30 kB | ||
| Motordaten Power-Motor 8:1 | H.A.R.R.Y. | Kennlinien und -werte für Getriebemotor 8:1 (35481). Version ohne Tipfehler. |
28 kB | ||
| Motordaten Power-Motor 20:1 | H.A.R.R.Y. | Kennlinien und -werte für Getriebemotor 20:1 (104589) an 9V. Version ohne Tipfehler. |
29 kB | ||
| Motordaten Encoder-Motor | H.A.R.R.Y. | Kennlinien und -werte für Encoder-Motor (135484) an 9V. Version ohne Tipfehler. | 29 kB | ||
| Motordaten XM-Motor | H.A.R.R.Y. | Kennlinien und -werte für XM-Motor (135485) an 9V. Version ohne Tipfehler. | 27 kB | ||
| Motordaten XS-Motor | H.A.R.R.Y. | Kennlinien und -werte für XS-Motor (137096) an 9V. Version ohne Tipfehler. | 26 kB | ||
| Motordaten XS-Motor mit U-Getriebe | H.A.R.R.Y. | Kennlinien und -werte für XS-Motor (137096) mit U-Getriebe (31078 & 31082) an 9V. Version ohne Tipfehler. | 33 kB | ||
| Motordaten Solar-Motor | H.A.R.R.Y. | Kennlinien und -werte für Solar-Motor (69205) an 2V. Version ohne Tipfehler. | 26 kB | ||
| Farbsortierer 2.0 | Manuel Neumann | Nach Vier Jahren habe ich eine neue Version von meinem Farbsortierer gebaut. Neu ist, dass er jetzt Blau und Schwarz in zwei Größen erkennen kann. Am Anfang werden die Werte der Farben ermittelt. YouTube Link: http://youtu.be/jVbV_SHyt_M |
588 kB | ||
| I²C-Treiber für 6-achsen MotionTracking Sensor | Christian Hehr | Erster verfügbarer I²C Treiber für den MPU-6050 mit folgenden Eigenschaften: - 3-Achsen digitale Beschleunigungswerte AX,AY und AZ bis maximal +/- 16g - 3-Achsen digitale Drehgeschwindigkeiten GX, GY, und GZ bis maximal +/- 2000 deg/s - Temperaturanzeige T im bereich von -40°C bis +85°C Alle Werte werden mit einer Samplingrate von 10Hz in einer Liste gespeichert für die weitere Verwendung in Excel. Programmiert in ROBO Pro V4.1.5 |
444 kB | ||
| ball on a plate - Ballbalancierer zweidimensional | techum / FTmodels | Robo Pro Programm zu Youtube Video https://www.youtube.com/watch?v=1ObdFOjeSV4 Das Programm nutzt in zwei Dimensionen den Algorithmus des ball on a beam. Leichte Unterschiede bei der Auswertung der Ballgeschwindigkeit und insbesondere der Richtung.. Meine Programmiererfahrung mit Robopro hält noch sich sehr in Grenzen, auch habe ich mich mit der PID Controller Theorie nicht auseinandergesetzt. Es geht also sicher viel besser. Der Aufbau ist simpel, vielleicht hat ja jemand Lust das ganze zu verbessern, so dass es dann so funktioniert: https://www.youtube.com/watch?v=uERF6D37E_o |
0.96 MB | ||
| einfaches Regal für fischertechnik | Jörg-Peter | Dies ist der Bauplan für eines der beiden in der ft:pedia 4/2015 vorgestellten Möbelstücke für die Aufbewahrung von größeren oder kleineren fischertechnik-Sammlungen. Der Plan stellt mit Schritt-für-Schritt-Bildern vor, wie man mit wenig und preiswertem Material und ohne großen Maschinenpark ein Möbelstück bauen kann, das sich leicht in die eigene Wohnsituation einpassen lässt. Alle benötigten Teile sollte man in jedem Baumarkt bekommen, und der komplette Nachbau ist mit einigen Stunden Zeitaufwand auch für Anfäger zu schaffen. |
3.32 MB | ||
| Speedtest V1.0 | ftDirk | Das Programm Speedtest V1.0 versucht zu ermitteln, wie schnell ein ROBOPro Programm ausgeführt wird. Die Geschwindigkeit der Programm-Ausführung ist in erster Linie vom verwendeten Controller abhängig: ROBOTICS TXT Controller -> USB: 401 Download: 35 (mit angeschlossener USB-Kamera: 39) ROBO TX Controller ----------> USB: 1990 Download: 3142 (im Flash: 3207) ROBO Interface (93293) ----> USB: ....? RS232: ....? Download: ....? Intelligent Interface ------------> RS232: ....? Download: ....? Zusammenfassung der aktuellen Ergebnisse: 1. Der TXT führt Programme online fast 5x schneller aus als der TXC 2. Der TXT führt Programme im Download-Modus fast 90x schneller aus als der TXC 3. Der TXT führt Programme im Download-Modus über 11x schneller aus als online 4. Der TXT führt Programme im Download-Modus mit angeschlossener USB-Kamera etwas langsamer aus als ohne USB-Kamera 5. Der TXC führt Programme im Download-Modus nur mit 2/3 der Online-Geschwindigkeit aus (a) 6. Der TXC fürhrt Programme im RAM etwas schneller aus als im Flash Anmerkungen: (a) Sehr stark abhängig von den ausgeführten Befehlen, d.h. nicht allgemeingültig! Die Werte können dazu benutzt werden, um in einem ROBOPro Programm festzustellen, auf welchem Controller das Programm läuft. Dies kann für die Auslegung zeitkritischer Funktionen benutzt werden, damit diese auf unterschiedlichen Controllern identisch arbeiten. Beispiel (einfache Verzweigung): Z > 1200 ---> J: ROBO TX Controller ---> N: ROBOTICS TXT Controller |
7063 Bytes | ||
| ft-Ringe mit Winkelsumme nahe 360° (ft:pedia 1/2017) | Rüdiger Riedel | xlsx | In dieser Excel-Datei habe ich alle die Ringe aufgelistet, die die Winkelsumme 360° knapp verfehlen. Als Grenzwert habe ich +/- 1° gesetzt, bezogen auf den einzelnen Baustein. |
36 kB | |
| KH Baumgart | Bausteinphilosoph | stl | Fidget Spinner (FS) Grundbaustein Fünfeck Mit dem FS Grundbaustein lassen sich kreative, hochwertige und individualisierte FS konstruieren. Das Achsloch hat einen Durchmesser von 12,4 mm, der Nut Durchmesser beträgt 4,4 mm und die Breite des Schaftes ist 3,4 mm. Bei mir passen alle Bausteine, Verbinder und Achsen durch die vorgesehenen Aussparungen. (Ultimaker) Als Kugellager passen 12mm Kugelager mit 4mm Achsloch (http://fischerfriendsman.de/index.php?p=6&sp=4#R6513) oder 1x Seilrolle 12, mini (38258) mit z.B. Rastachse 30 mm (35063), 2x Hülse mit Scheibe 15 mm (35981) und 2x BSB Puffer schwarz (36132) oder 3x Seilrolle 12, mini (38258), 2x Hülse mit Scheibe 15 mm (35981) und Achse 30 (6500). Oder, oder...oder. Lasst eurer Phantasie freien Lauf. |
202 kB | |
| Hochregallager I2C OLED u Tastatur | Helmes | 7z | Das Hochregallager von Fischertechnik wird unabhängig vom PC gesteuert und bedient. Beides wird von einem - mit etwas Hardware erweiterten - ftDuino erledigt. Infos für den Benutzer werden mittels OLED Display ausgegeben, Werte werden mit einer Matrixtatstatur eingegeben. Die Hardware besteht neben dem Modell selbst, aus den ftcommunity-Komponenten ftDuino, ftExtender und ftOLED sowie einem IO Expansion Board und einer 4x4 Matrix-Tastatur. Das Programm selbst ist eng angelehnt an das von der ftc veröffentlichte Beispiel 'HighLevelRack'. |
613 kB |
{kind=link}
Wiki / FAQ:
FAQ: Forum
FAQ: fischertechnik
Programmieren des Robo-Interface in C
SF ft Community Publisher 1.0 Bedienungsanleitung
FAQ: RoboPro
Analyse des Robo upload Protokolls
RoboPro: Kommunikation via serieller Schnittstelle mit dem PC
FAQ: Fotografieren von ft-Modellen
Links:
Händler
Bugtracker:
Bilder
Bewertungsfunktion (upvote/downvote) -- für Bilder? Kommentare? Kategorien?
weitere Seiten:
chat
freespeed
freespeedspeech
ftpedia
datenschutz
ftpedia_Artikeluebersicht