

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Defiants MR 2009 | path_detect.jpg
 scan360.png
scan360.png
|
path_detect.jpg |
P2150001.JPG

|
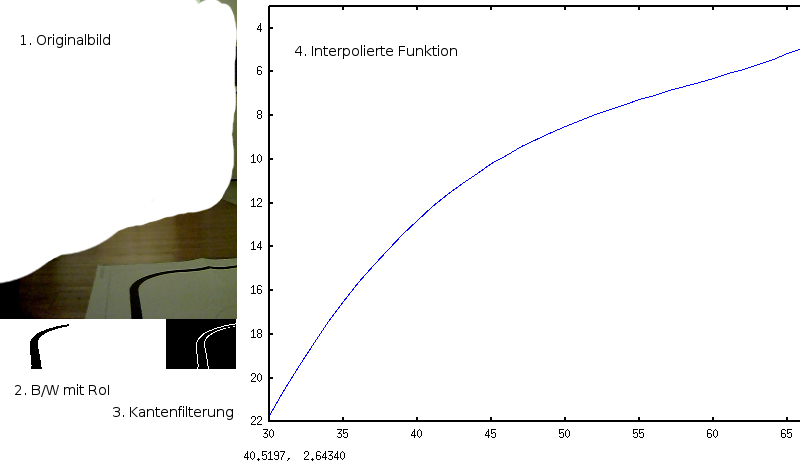
| Beschreibung: | Spurverfolgung ohne Spursensor:
Bild 1: Die Spur wird mit einer Kameraaufgenommen (Aus Datenschutzgrund hier etwas bearbeitet) Bild 2: Das Bild wird anschließend Binarisiert. Es wird nur der relevante Teil weiter betrachtet. Bild 3: Es wird ein Kantenfilter angewendet um die Spur zu identifizieren. Bild 4: Aus dem letzten Bild lässt sich dann eine Kurve interpolieren (Hier 3. Grad) auf dem der Roboter fahren kann. |
| Hinzugefügt am: | 25.02.12 14:04 |
| Konstrukteur: | Defiant |
| Fotograf: | Defiant |
| Hinzugefügt von: | Defiant |
|
||||