|
Autor:
|
Kommentar:
|
heiko
02.05.11 20:30
|
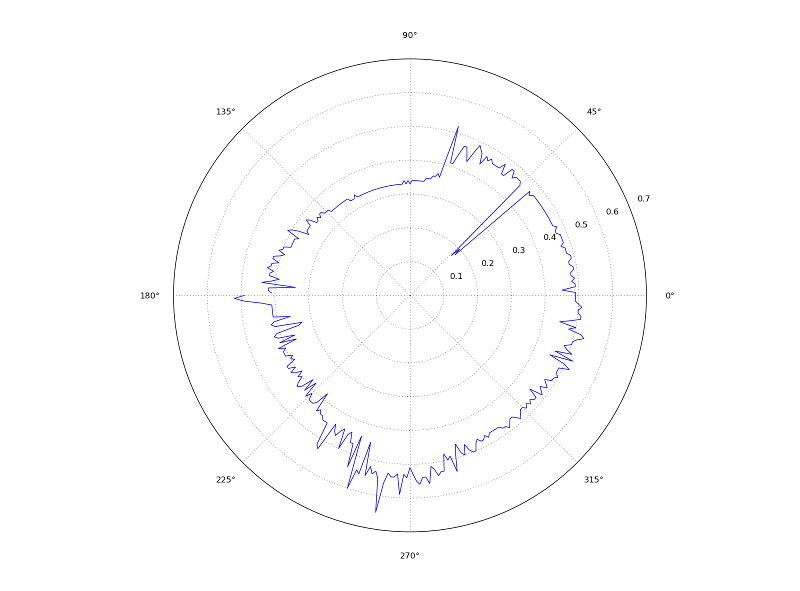
So what should the sensor see in theory?
|
| |
Defiant
02.05.11 21:02
|
Well in this scenario by "something" from every side, aka boxes and me. As you can see there is about 45cm on the left, 48cm front, 40cm back and 50cm on the right.
While the bot is not standing in parallel to the objects but about 30° off.
|
| |
Defiant
02.05.11 21:10
|
Well in this scenario by "something" from every side, aka boxes and me. As you can see there is about 45cm on the left, 48cm front, 40cm back and 50cm on the right.
While the bot is not standing in parallel to the objects but about 30° off.
|
| |
Dirk Fox
03.05.11 02:27
|
Hallo Defiant,
das Zählen ist etwas mühsam, daher meine Frage: hast Du 360 Messwerte erzeugt?
Und woher kommt die "Sägezahn-Kurve" in Deinem Diagramm? Ich hätte erwartet, dass ein Ultraschallsensor auf diese Distanzen einigermaßen präzise misst und daher eine eher glatte Linie liefert. Mit dem ft-Distanzsensor (liefert cm-Werte in Robo Pro) habe ich Abweichungen von max. 1 cm gemessen. Oder "zittert" dein Roboter?
Beste Grüße,
Dirk
|
| |
Defiant
03.05.11 06:52
|
Es sind 360 Messwerte.
Die Genauigkeit des SRF08 is 3-4cm. Ich könnte eventuell zusätzliche Abweichungen bekommen weil der Sensor nicht gedämpft gelagert ist.
|
| |
pvd
07.05.11 12:24
|
Mmmm, der Sensor war nicht gedämpft gelagert und dann solche Kurbe ? Das ist deutlich der indirekte Beweis das es widerum irgendwo ein grosses Erdbeben gegeben hat. Wann und wo wurde diese Messung gemacht ?
|
| |
Defiant
12.06.11 21:05
|
In meinem unterirdischen Geheimlabor in Asien.
|
| |


 kabelsalatv1.jpg
kabelsalatv1.jpg
")