

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Experimentelle Antriebe | defiant_prototyp_3_rad_v2_noservo.jpg
 defiant_prototyp_3_rad_v2_iic.jpg
defiant_prototyp_3_rad_v2_iic.jpg
|
defiant_prototyp_3_rad_v2_noservo.jpg ")
|
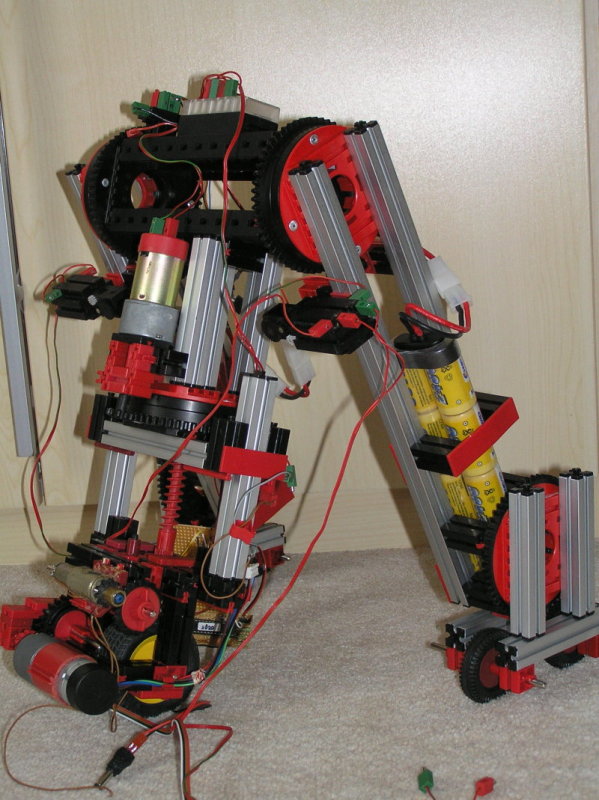
| Beschreibung: | Die Servos waren leider nur ein kurzer Ausflug: Zurück zu den stabilen Drehkränzen.
Die Positionserfassung wird wahrscheinlich über Neigungsmesser erfolgen. |
| Hinzugefügt am: | 03.08.08 18:29 |
| Konstrukteur: | Defiant |
| Fotograf: | Defiant |
| Hinzugefügt von: | Defiant |
|
||||||