

ftCommunity | Bilderpool | Unsere Modelle | Roboter, Industrieanlagen und Computing | Lauf-, Fahr- und Kletterroboter | Experimentelle Antriebe | defiant_prototyp_3_rad_v2_iic.jpg
 defiant_prototyp_3_rad_v2_alu.jpg
defiant_prototyp_3_rad_v2_alu.jpg
|
defiant_prototyp_3_rad_v2_iic.jpg ")
|
defiant_prototyp_3_rad_v2_noservo.jpg

|
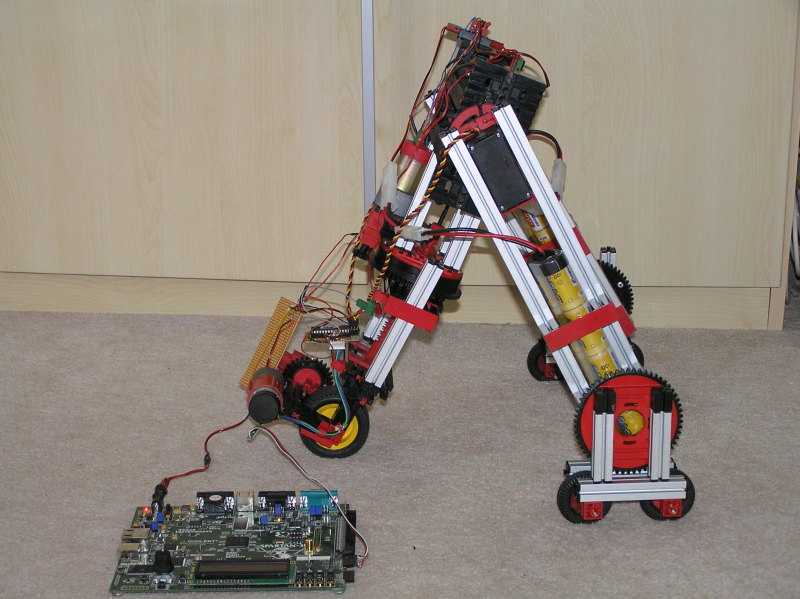
| Beschreibung: | Die ft Gummireifen haben jetzt schon unter dem Gewicht nachgegeben. Also habe ich sie ausgetauscht gegen die älteren Reifen aus dem Start 100. Die Steuerung, ein Spartan3e FPGA mit Microblaze softcore, gibt jetzt die Position für die Servos über I2C vor. Die Servos sind leider schon jetzt ziemlich beschäftigt. |
| Hinzugefügt am: | 27.07.08 20:25 |
| Konstrukteur: | Defiant |
| Fotograf: | Defiant |
| Hinzugefügt von: | Defiant |
|
||||||||||||||||||