

ftCommunity | Suche
Suchergebnisse
Kategorien im Bilderpool:
![]() Messtechnik
Messtechnik
![]() Neigungssensor
Neigungssensor
![]() interface
interface
![]() Bilder zum Verlinken
Bilder zum Verlinken
![]() Elektronik
Elektronik
Bilder im Bilderpool:
 fischertechnik Interface X2 (chehr) Elektronik Kommentare: 0 |
 fischertechnik Interface X2 (chehr) Elektronik Kommentare: 0 |
 fischertechnik Interface IBM (chehr) interface Kommentare: 0 |
||
 fischertechnik Interface IBM (chehr) interface Kommentare: 1 |
 fischertechnik Interface IBM (chehr) interface Kommentare: 0 |
 fischertechnik Interface IBM (chehr) interface Kommentare: 0 |
||
 fischertechnik Interface IBM (chehr) interface Kommentare: 0 |
 fischertechnik Interface IBM (chehr) interface Kommentare: 0 |
 fischertechnik Interface Artikel ? (chehr) interface Kommentare: 0 |
||
 fischertechnik Interface Artikel ? (chehr) interface Kommentare: 0 |
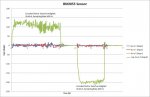 BNO055 Gyroscope (chehr) Neigungssensor Kommentare: 0 |
 BNO055 Gyroscope with Velocity control (chehr) Neigungssensor Kommentare: 0 |
Downloads:
| Bezeichnung | Autor | Format | Beschreibung | Größe | Datum |
| I²C-Treiber für 6-achsen MotionTracking Sensor | chehr | The triple-axis MEMS in the MPU-91550 includes a wide range of features: Gyroscope Features: • Digital-output X-, Y-, and Z-Axis angular rate sensors (gyroscopes) with a user-programmable fullscale range of ±250, ±500, ±1000, and ±2000°/sec Accelerometer Features • Digital-output 3-Axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g • Orientation detection and signaling • Tap detection Magnetometer Features • 3-axis silicon monolithic Hall-effect magnetic sensor with magnetic concentrator • Output data resolution is 13 bit (0.3 μT per LSB) • Full scale measurement range is ±1200 μT |
729 kB | ||
| I²C-Treiber für 6-achsen MotionTracking Sensor | chehr | Erweiterung für den I²C Treiber MPU-6050 / 9150 mit folgenden Eigenschaften: 1. Motion detection (Bewegungsmelder) +X, -X ,+Y, -Y, +Z und -Z Achse. 2. Einstellung der Sensitivität und Dauer. Ideal als Kollisionszähler, z.B. für den Fischertechnik Flipper Programmiert in ROBO Pro V4.1.6 |
202 kB | ||
| I²C-Treiber für VCNL4010 Entfernungs- und Lichtsensor | chehr | Der VCNL4010 Sensor ist ideal, wenn sie Ihrem fischertechnik-Projekt einen Näherungssensor für kurze Distanzen von 1 bis 200 mm hinzufügen wollen. Auserdem verfügt er auch über einen eingebauten Lichsensor. Programmiert in ROBO Pro V4.2.3 |
184 kB | ||
| I²C-Treiber LED und Servoansteuerung Version 1.0 | chehr | RoboPro I2C Treiber für 16 Servo- oder 16 LEDs die dann über RoboPro gesteuert werden können. Programmiert in ROBO Pro V4.2.3 Unbedingt Hinweise im Forum beachten! |
728 kB | ||
| I²C-Treiber LED Ansteuerung PCF8574 | chehr | Dieser I2C Treiber kann bis zu 7 LEDs ansteuern (ein-, ausschalten oder blinken), welche am Ausgang von dem Baustein PCF8574 angeschlossen sind, oder die Ausgänge können als digitale Eingänge verwendet werden. Programmiert in RoboPro V4.2.3 |
246 kB | ||
| I²C-Treiber LED und Servoansteuerung Version 2.0 | chehr | RoboPro I2C Treiber für Servo oder LEDs die dann über RoboPro gesteuert werden können. Programmiert in ROBO Pro V4.2.3 Unbedingt Hinweis und Beschreibung im Forum beachten! Siehe http://forum.ftcommunity.de/viewtopic.php?f=8&t=3407 |
391 kB | ||
| RoboPro-I²C-Teiber AD / DA-Wandler PCF8591 | chehr | RoboPro-I²C-Teiber für den AD / DA-Wandler PCF8591. - 4x Analogeingänge - 1x Analogausgang - Auflösung: 8 Bit |
175 kB | ||
| RoboPro-I²C-Teiber für DC-Motoren, LEDs etc, DRV8830 | chehr | - Eine Last ansteuerbar - 2,75V bis 6,8V Spannungsversorgung - 1A max Strom - Elektrische Schutzfunktionen (Strom-, Spannungs- und Temperaturlimit) - Standby, Vorlauf, Rücklauf und Bremse |
168 kB | ||
| Servo am TX oder TXT | chehr | Robo Pro Programm und Anleitung zum Regeln von Servos direkt am TX oder TXT. Am TXT kann der Servo via IR Control ferngesteuert werden. Benötigt wird ein Getriebemotor mit Potentiometer als Winkelsensor. |
1.08 MB | ||
| I²C-Treiber für einen intelligenten 9-achsen absolut orientierten Sensor von Bosch (BNO055) V1 | chehr | Dank dem verbauten 32-bit cortex M0+ Microcontroller stehen folgende Sensor fusion daten von den 3 Sensoren (Accelerometer, Magnetometer, Gyroscope) zur Verfügung: Quaternion, Euler Winkel, Beschleunigung, Winkelgeschwindigkeit, Heading, Kompass |
780 kB |